



WIHT LRF")
45MJレーザーターゲット指定子(LTD)WIHT LRF
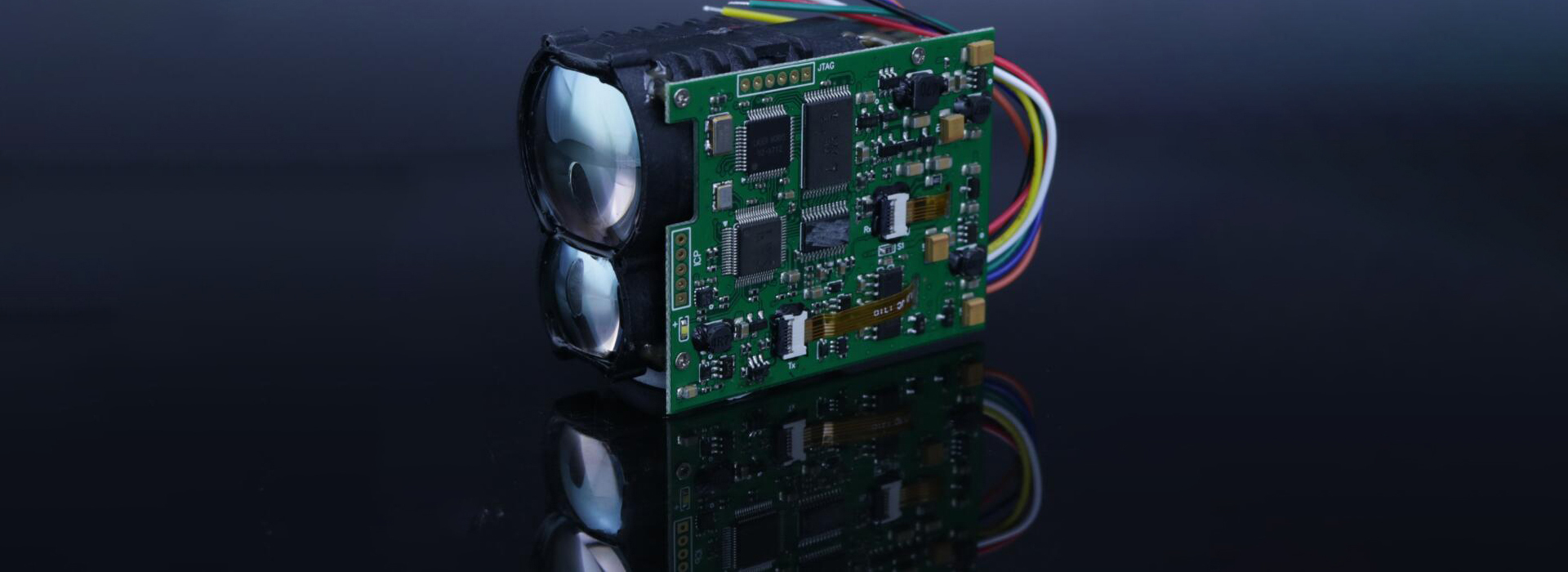
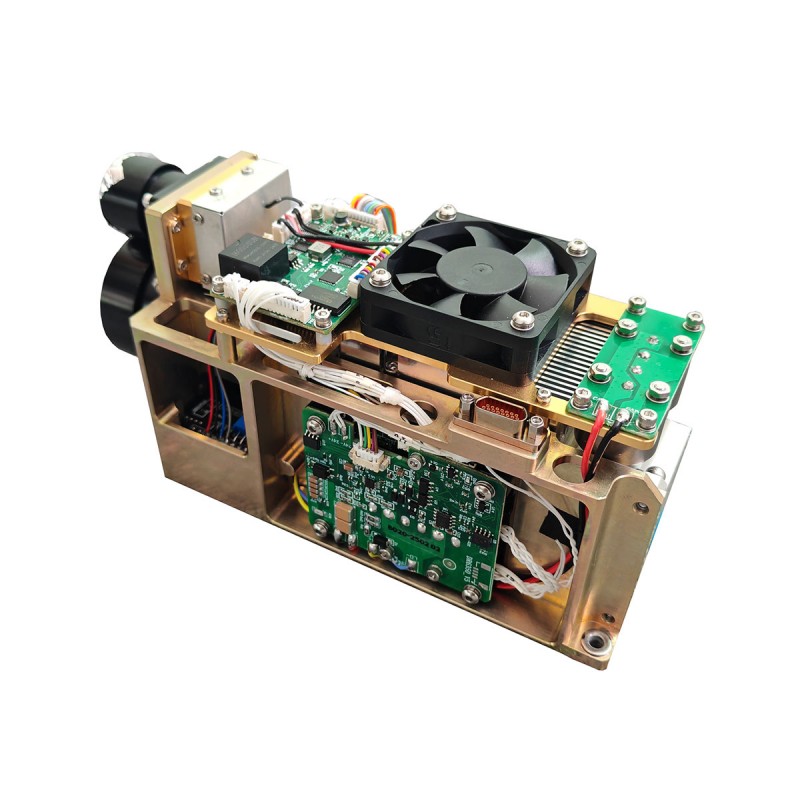
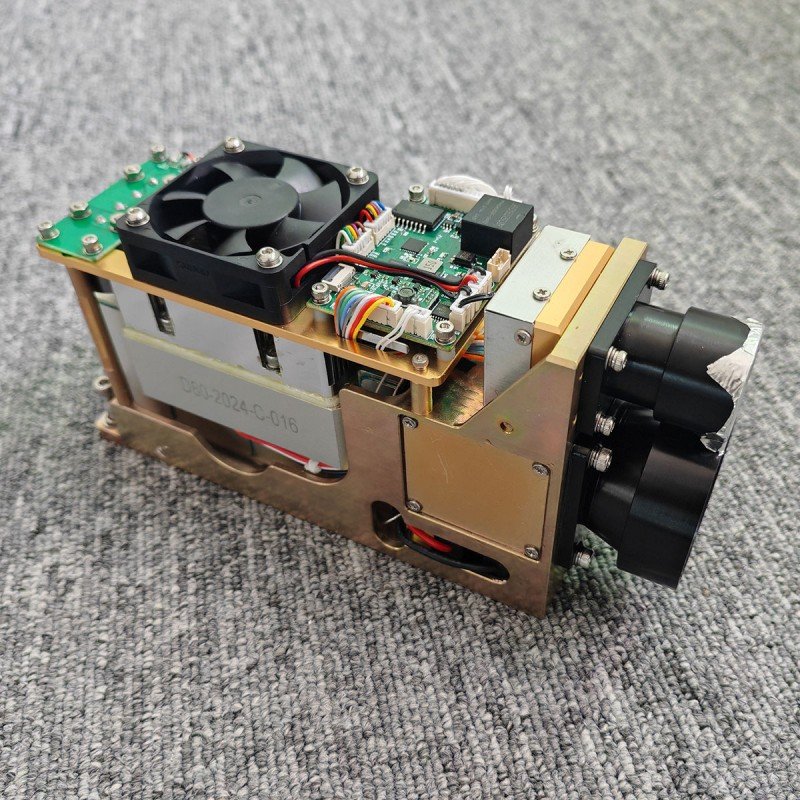
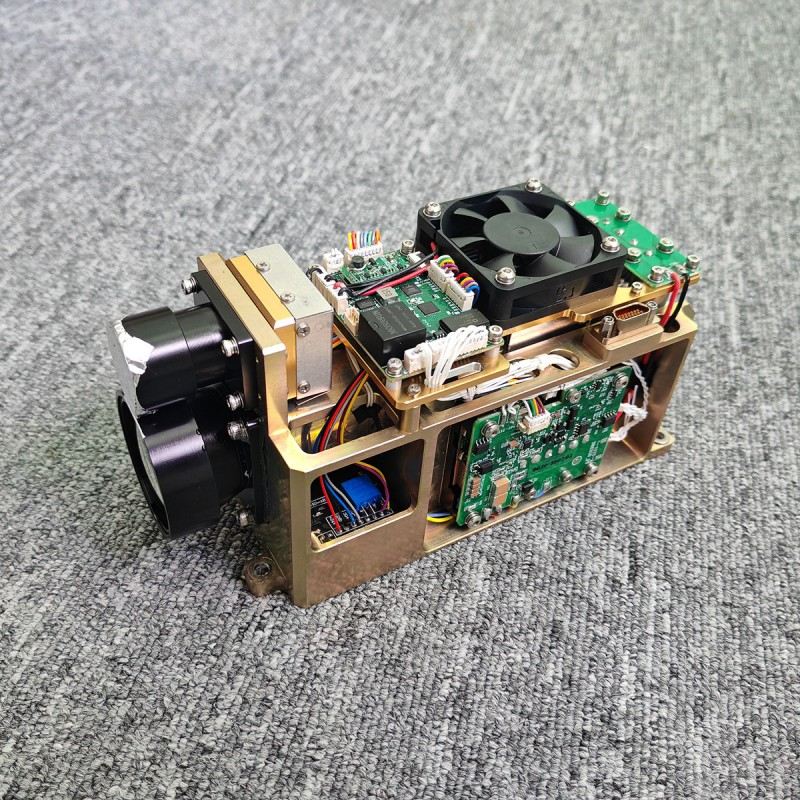
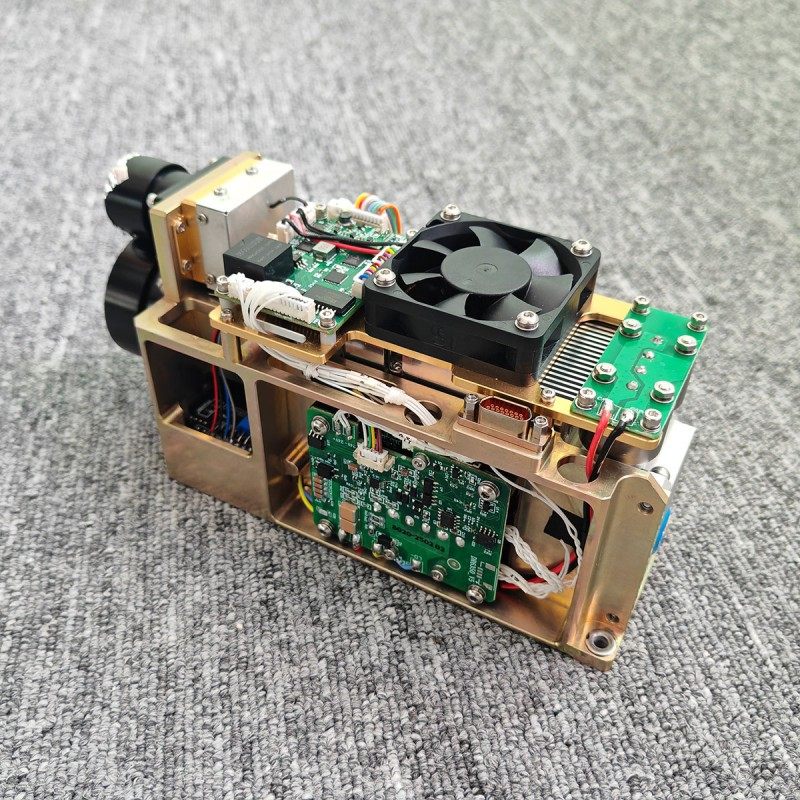
STA-B45Mは、スマート弾薬のための正確なガイダンスを提供できる精密照準システムで重要な役割を果たす軍事45MJレーザーターゲット指定子です。高度な光学システムを通じて、レーザービームでターゲットをマークし、精密誘導武器が非常に高い精度と効率でターゲットを破壊できるようにします。
お問い合わせを送信
製品説明
製品機能
軽量で小型化
環境適応性:-40 ℃〜60℃幅の幅の適応性
環境適応性:-40 ℃〜60℃幅の幅の適応性
コアインジケータパラメーター
関数
a)照射サイクルを設定する機能があり、設定サイクルに応じてレーザー照射を実行できます。
b)レーザーシングルおよび繰り返しの距離機能を装備しています。
c)マルチターゲット範囲機能を装備。
d)カメラのコアコンポーネントの温度出力関数を装備しています。
e)測定デバイスの過熱保護機能を装備しています。
f)照明装置のステータス情報を出力する機能を備えています。
a)照射サイクルを設定する機能があり、設定サイクルに応じてレーザー照射を実行できます。
b)レーザーシングルおよび繰り返しの距離機能を装備しています。
c)マルチターゲット範囲機能を装備。
d)カメラのコアコンポーネントの温度出力関数を装備しています。
e)測定デバイスの過熱保護機能を装備しています。
f)照明装置のステータス情報を出力する機能を備えています。
技術的なパラメーター
| モデル | STA-B6445M |
| レーザー波長 | 1.06um(nd:yagクリスタル、デザイン選択保証を使用) |
| レーザー平均エネルギー | ≥45MJ(エネルギー変動≤±8%); |
| レーザー発散角 | 0.5mrad |
| レーザー放射光軸の安定性 | ≤0.05mrad |
| レーザー放射光軸とベースプレーンの設置は平行ではありません | ≤3 '(設計保証); |
| レーザーパルス幅 | 10ns〜22ns |
| マックスレンジ | 視認性≥12km、NATOターゲットを6km以上測定するための最大範囲。 |
| ミニレンジ | 100m |
| 繰り返し頻度 | 1Hz/5Hz/シングル |
| 範囲の精度 | ≤±2m(rms) |
| 範囲の精度 | 98%以上 |
| 距離解像度 | ≤50m |
| 連続範囲の労働時間 | 5分(5Hz:連続した作業5分、休息3分以下、範囲を継続できます)。 |
| 最大照射距離 | ≥5km |
| 最小照射距離 | ≤500m(システム評価付き) |
| 連続照射サイクル | 8、各サイクルは25秒、15秒の間隔が続きます。 8サイクル後、休憩間隔≤20分。 |
| レーザーコード期間(通信プロトコルによって設定) | 範囲の設定40ms ~100ms |
| レーザーコーディングタイミングの精度 | ≤±2μs |
| レーザー起動時間 | ≤3分 |
| エクストラコード同期関数 | はい |
| 作業温度: | -40〜+60℃ |
| 保管温度 | -50〜+70℃ |
| 重さ | ≤580g |
| あなたへのモジュール | 138x75x50mm |
| マルチターゲット測定機能を使用し、距離選択パス機能を使用して、3つのマルチターゲット値を返します。周波数コードと変数間隔コードを設定できます(通信プロトコルによって設定)。 | |
使用の準備
電源電圧が18V〜32Vのかどうかを確認してください。電圧が低すぎる場合(18V未満)、レンジファインダーは正しく通信しないか、「レーザー出力なし」を示し、電圧が高すぎる(32Vを超える)場合、照明器全体が永久に損傷する場合があります。電源システムの定格出力電流が6aを超えることを確認してください。この値よりも少ない場合、動作中にレーザーがない場合があります。電源の極性が正しく接続されていることを確認してください。極性が逆転した場合、機器に損傷のリスクがあります。電源ソケットの定義については、付録Aを参照してください。
使用するための注意事項
a)このレンジファインダーによって放出されるレーザーは、1.06µmの非目の安全波長レーザーであり、使用時に目への直接レーザー光を避けてください。
b)光軸の並列性を調整するときは、受信レンズをブロックするようにしてください。そうしないと、強いエコーのために検出器が永続的に損傷します。
c)この範囲ファインダーモジュールは気分が悪いです。環境を使用して、相対湿度が80%未満であり、レーザーに損傷を与えないように環境の清潔さと衛生の使用を確認してください。
d)レンジファインダーの範囲は、大気の可視性とターゲットの性質に関連しています。緑の葉のクラスター、白い壁、露出した石灰岩などのターゲットは、反射率が向上し、範囲が増加する可能性があります。さらに、レーザービームへのターゲットの傾斜の増加は範囲を減らします。
e)強力なエコーを避けるために、100メートル以内のガラスや白い壁などの強力な反射ターゲットでレーザービームを発射することは厳密に禁止されています。
f)エネルギーを与えられている間にケーブルを抜くまたは塞ぐことは厳密に禁止されています。
g)電力極性が正しく接続されていることを確認します。そうしないと、デバイスに永久的な損傷につながります。
b)光軸の並列性を調整するときは、受信レンズをブロックするようにしてください。そうしないと、強いエコーのために検出器が永続的に損傷します。
c)この範囲ファインダーモジュールは気分が悪いです。環境を使用して、相対湿度が80%未満であり、レーザーに損傷を与えないように環境の清潔さと衛生の使用を確認してください。
d)レンジファインダーの範囲は、大気の可視性とターゲットの性質に関連しています。緑の葉のクラスター、白い壁、露出した石灰岩などのターゲットは、反射率が向上し、範囲が増加する可能性があります。さらに、レーザービームへのターゲットの傾斜の増加は範囲を減らします。
e)強力なエコーを避けるために、100メートル以内のガラスや白い壁などの強力な反射ターゲットでレーザービームを発射することは厳密に禁止されています。
f)エネルギーを与えられている間にケーブルを抜くまたは塞ぐことは厳密に禁止されています。
g)電力極性が正しく接続されていることを確認します。そうしないと、デバイスに永久的な損傷につながります。
インターフェイスソケットの定義
表1外部インターフェイスの定義
表1外部インターフェイスの定義
| 注文番号 | インターフェイスタイプ | 顔料 | 意味 | 備考 |
| 1 | DB9インターフェイス定義 | 手のひら | RS422 T+ | RS422通信インターフェイス |
| 2 | 紫 | RS422T- | ||
| 3 | 黄色 | RS422 R- | ||
| 4 | 緑 | RS422 R+ | ||
| 5 | 白 | GND | ||
| 6 | 灰 | 外部トリガー - | RS422レベル | |
| 7 | 青 | 外部トリガー + | ||
| 8 | パワーインターフェイスの定義 | 黒 | VCC+ | DC 18V~32V |
| 9 | 赤 | vcc- |

図2製品の2次元サイズ図
インターフェイス通信プロトコル
1.コミュニケーション形式:
a)デフォルトのボーレートは115200bpsです。
b)データ形式:8ビットデータ、1つのスタートビット、ワンストップビット、パリティチェックなし、データはヘッダーバイト、コマンドパーツ、データ長、パラメーターパーツ、チェックバイトで構成されます。
2.コミュニケーションモード:
a)マスターと測定デバイスは、マスタースレーブ通信モードを使用します。マスターは、測定デバイスにコントロールコマンドを送信し、測定デバイスが指示を受信して実行します。範囲の状態では、測定デバイスは測定デバイスのデータとステータスを範囲の期間に応じて上部コンピューターに送り返し、通信形式とコマンドコンテンツを次の表に示します。
b)マスターがコントロールコマンドを送信した後、メーターは3つの応答コマンドで継続的に応答します。マスターが制限時間内にメーターから応答コマンドを受け取らない場合、再び再送信します。
送信されるメッセージの形式は次のとおりです
a)デフォルトのボーレートは115200bpsです。
b)データ形式:8ビットデータ、1つのスタートビット、ワンストップビット、パリティチェックなし、データはヘッダーバイト、コマンドパーツ、データ長、パラメーターパーツ、チェックバイトで構成されます。
2.コミュニケーションモード:
a)マスターと測定デバイスは、マスタースレーブ通信モードを使用します。マスターは、測定デバイスにコントロールコマンドを送信し、測定デバイスが指示を受信して実行します。範囲の状態では、測定デバイスは測定デバイスのデータとステータスを範囲の期間に応じて上部コンピューターに送り返し、通信形式とコマンドコンテンツを次の表に示します。
b)マスターがコントロールコマンドを送信した後、メーターは3つの応答コマンドで継続的に応答します。マスターが制限時間内にメーターから応答コマンドを受け取らない場合、再び再送信します。
送信されるメッセージの形式は次のとおりです
| STX0 | CMD | レン | data1h | data1l | chk |
表2送信されたメッセージの形式の説明
| 注文番号 | 名前 | 説明する | コード | 備考 |
| 1 | STX0 | メッセージ開始フラグ | 55(h) |
|
| 2 | CMD | CW | 表3を参照してください |
|
| 3 | レン | DL | 開始マーク、コマンドワード、チェックサムを除くすべてのバイトの数 |
|
| 4 | データ | パラメーター | 表3を参照してください |
|
| 5 | 到着 |
|
||
| 6 | chk | XOR検証 | 有効なバイトを除いて、他のすべてのバイトはXoredです |
|
コマンドは次のように説明されています。
表3マスターからメーターに送信されたコマンドとデータワードの説明
表3マスターからメーターに送信されたコマンドとデータワードの説明
| 注文番号 | CW | 関数 | データバイト | 備考 | 長さ | 例コード |
| 1 | 0x00 | 停止する(照明の範囲を停止) | d1 = 00 (H)D0 = 00 (H) |
|
6バイト | 55 00 02 00 00 57 |
| 2 | 0x01 | シングルレンジ | d1 = 00 (H)D0 = 00 (H) | 測定デバイスは、単一の範囲の命令を受信し、範囲の操作を実行し、範囲の距離値を同時にアップロードします。 | 6バイト | 55 01 02 00 00 56 |
| 3 | 0x02 | 連続的な範囲 | d1 = xx | セット範囲の期間によると、範囲の距離値は継続的にアップロードされます。データは範囲の期間を表現し、ユニットはMSです | 6バイト | 55 02 02 03 e8 be(1Hz範囲) |
| 4 | 0x03 | セルフチェック | d1 = 00 (H)D0 = 00 (H) |
|
6バイト | 55 03 02 00 00 54 |
| 5 | 0x04 | ブラインドゾーンのセットアップ | d1 = xx | データは、ブラインドゾーンの値であるユニット1Mを記述し、ブラインドゾーン内の距離ディスプレイを0に設定します。 | 6バイト | 55 04 02 01 2c 7e(300mが最も近い距離) |
| 6 | 0x06 | 光出力クエリの累積数 | d1 = 00 | ストレージの電源; | 6バイト | 55 06 02 00 00 51 |
| 7 | 0x31 | 正確なコードを設定します | D4 D3〜D0 | D4:正確なコード番号、ビルトイン8グループ、番号1〜8; D3〜D0はパルス期間を表し、ユニットUSRANGE:45000〜60000 | 9バイト | 55 31 05 01 00 00 C3 50 F3(正確なコード番号:1サイクル:0000C350 = 50000US) |
| 8 | 0x32 | 変数間隔コードを設定します | D33(参照)D32(コーディングビット数)D31〜D30(最終ビット間の時間間隔)D29〜D28(ビット14とビット15の間の時間間隔)D27〜D26(ビット13ビット14間の時間間隔) BIT10 BIT11)D19〜D18(BIT9 BIT10間の時間間隔)D17〜D16(BIT8 BIT9間の時間間隔)D15〜D14(BIT7 BIT8間の時間間隔) BIT4)D5〜D4(BIT2 BIT3間の時間間隔)D3〜D2(BIT1 BIT2間の時間間隔)D1〜D0(BIT0とBIT1の間の時間間隔) | D33:変数間隔コード番号、組み込み16グループ、数値範囲は1〜16; D32:3〜16時間間隔ユニットUSRANGE:45000〜60000の範囲のコーディングビットの数 | 38バイト |
|
| 9 | 0x33 | 擬似ランダムコードの設定 | D4 D3〜D0 | D4:2つの組み込みグループを含む2つの組み込みグループを備えた擬似ランダムコードコーディング、D3:擬似ランダムコードの長さ、2〜16d2 D1:擬似ランダムコードの初期値。これは、擬似ランダムコード0:スタンバイ、Set 0、Set 0、Set as | 9バイト | 55 33 05 01 10 AA AA 00 72(擬似ランダムコード番号:1pseudoランダムコード長:16Initial値:AAAA) |
| 10 | 0x41 | 精密コードのクエリを設定します | D1 D0 | D1:正確なコード番号、数値範囲は1〜8d0:スタンバイ、セット0です | 6バイト | 55 41 02 01 00 13精度コード1のクエリをセット |
| 11 | 0x42 | 可変間隔コードのクエリを設定します | D1 D0 | D1:変数間隔コード番号、数値範囲は1〜16d0:スタンバイ、セット0です | 6バイト | 55 42 02 01 00 14変数エンコード1のクエリをセット |
| 12 | 0x43 | 擬似ランダムコードのクエリを設定します | D1 D0 | D1:擬似ランダムコード番号、数値範囲は1〜2D0:スタンバイ、セット0です | 6バイト | 55 43 02 01 00 15擬似ランダムコーディングでクエリをセット |
| 13 | 0x44 | 連続照射作業時間設定 | d1 = 00 (H)D0 = yy (H) | YY連続照射時間とは、連続照射モード、単位sの下でのメーターの連続作業時間を指します。自動停止は、タイムアウト後に停止します | 6バイト | 55 44 02 00 3C 2 ff -CONTINUOUS WARKING TIME 60S |
| 14 | 0x45 | 連続照射作業時間クエリ | d1 = 00 (H)D0 = 00 (H) |
|
6バイト | 55 45 02 00 00 12 |
| 15 | 0x30 | 正確なコード照射 | D3〜D0 | D3:照射モード、00連続照射、01周期照射D2:01正確なコード照射D1:正確なコード番号D0:スタンバイ00 00 | 8バイト | 55 30 04 00 01 01 00 61コード1、正確なコードの連続照明 |
| 可変間隔コード照射 | D3〜D0 | D3:照射モード、00連続照射。 01周期的照射D2:02変数間隔コードIrradiationD1:変数間隔コード番号D0:スタンバイ00 | 8バイト | 55 30 04 00 02 01 00 62CODE 1、可変間隔コード連続照射 | ||
| 外部同期照射 | D3〜D0 | D3:00外部同期は連続照明のみですD2:03外部同期照射D1:00D0:00 | 8バイト | 55 30 04 00 03 00 00 62 | ||
| 擬似ランダムコード照射 | D3〜D0 | D3:照射モード、00連続照射。 01周期照射D2:04擬似ランダムコード照射D1:擬似ランダムコード番号D0:スタンバイ00 | 8バイト | 55 30 04 00 04 01 00 64コード1、擬似ランダムコード連続照射 | ||
| 16 | 0x24 | 定期的な照射パラメーター設定 | D2 D1 D0 | D2:作業数cyclesd1:サイクルあたりの作業時間、ユニットSD0:サイクルあたりの休憩時間、 | 7バイト | 55 24 03 08 14 0A 64(サイクルあたり8サイクル、20秒間の休憩) |
| 17 | 0x25 | 周期的な照射パラメータークエリ | d1 = 00 (H)D0 = 00 (H) |
|
6バイト | 55 25 02 00 00 72 |
| 18 | 0xeb | 機器番号クエリ | d1 = 00 (H)D0 = 00 (H) |
|
6バイト | 55 EB 02 00 00 00 00 |
| 19 | 0x51 | デバッグモード | D1 D0 | D1:01デバッグモードの入力、00出口DebuggingModed0:Standby | 6バイト | 55 41 02 01 00 17ENTER DEBUG MODE55 41 02 00 00 16EXITデバッグモード |
|
|
|
|
|
|
|
|
a)メインコントロールはフォーマットを受け取ります
受信したメッセージの形式は次のとおりです。
受信したメッセージの形式は次のとおりです。
| STX0 | CMD | レン | データ | 日付0 | chk |
表4受信したメッセージの形式の説明
| 注文番号 | 名前 | 説明する | コード | 備考 |
| 1 | STX0 | メッセージ開始フラグ1 | 55(h) |
|
| 2 | cmd_jg | データコマンドワード | 表5を参照してください |
|
| 3 | レン | DL | 開始マーク、コマンドワード、チェックサムを除くすべてのバイトの数 |
|
| 4 | dn | パラメーター | 表5を参照してください |
|
| 5 | D0 |
|
||
| 6 | chk | XOR検証 | 有効なバイトを除いて、他のすべてのバイトはXoredです |
|
メインコントロール受信ステータス説明:
表5は、メーターによってマスターに送信されたデータワードを示しています
表5は、メーターによってマスターに送信されたデータワードを示しています
| 注文番号 | CW | 関数フィードバック(測定デバイスが受信したコントロールコマンドに対応) | データバイト | 備考 | 全長 |
| 1 | 0x00 | 停止する(照明の範囲を停止) | d1 = 00 (H)D0 = xx (H) | xx:00停止時の停止02停止期間中 | 6バイト |
| 2 | 0x03 | セルフチェック | D8〜D0C5〜C0B2〜B0 | D8-D7(INTタイプ):-5V電圧値フィードバック、ユニット0.01V.D6-D5:ブラインドスポット設定値のフィードバック、ユニット1MD4-D3:APD高電圧フィードバック、ユニットV; D2:charタイプ、主要なコントロール環境温度(環境)、ユニット:celsius度:d1-D0: +5V電圧フィードバック、 +5V電圧獲得0.01VC5-C4 AC3-C2:ユニットのドライブ電流値のフィードバックを設定しますAC1-C0:温度制御温度フィードバックユニット0.1℃B2:ドライブ温度制御ステータス(8ビット)ビット:0温度制御への温度制御1:0温度制御は通常の温度制御です。ドライブ電流とセット値の差は5AB1より大きい:ドライブ通信ステータス(メインコントロールボードとドライブモジュール間の通信ステータスを測定)0は正常であり、1はfaultbit0です。 QueryB0:温度制御通信ステータス(メイン制御ボードと温度制御モジュール間の通信ステータス)0は正常であり、1はfaultbit0です:温度制御の開始が成功するかどうか:温度制御停止が成功したかどうか: | 22バイト |
| 3 | 0x04 | ブラインドゾーン設定、ユニットm | D1 D0 | データは、最も近い距離値、ユニット1mを記述します。高く開始し、低くなります | 6バイト(ドロップ停電) |
| 4 | 0x06 | 光出力クエリの累積数 | D3〜D0 | データは、最初にハイバイトでライト数、4バイト、4バイトを表します | 8バイト |
| 5 | 0x31 | 正確なコードを設定します | D4 D3〜D0 | D4:正確なコード番号、範囲1〜8D3〜D0は、ピリオド、ユニットUSRANGE:45000〜60000を表します | 9バイト |
| 6 | 0x32 | 変数間隔コードを設定します | D1 D0 | D1変数間隔コード番号範囲1〜16d0 00が正常に設定され、01が故障して設定されています | 6バイト |
| 7 | 0x33 | 擬似ランダムコードを設定します | D1 D0 | d1擬似ランダムコード番号範囲1〜2d0 00が正常に設定され、01が故障して設定されています | 6バイト |
| 8 | 0x41 | 正確なコードサイクルクエリ | D4 D3〜D0 | D4:正確なコード番号、範囲1〜8d3〜D0は、期間を表します。ユニットUSRANGE:45000US〜60000US | 9バイト |
| 9 | 0x42 | 可変間隔コードクエリ | D33(REF。)D32(コーディングビット数)D31〜D30(最後のビット間の時間間隔)D29〜D28(BIT14 BIT15の間の時間間隔)D27〜D26(BIT13 BIT14間の時間間隔)D25〜D24(ビット12とビット12とビット間の時間間)ビット10とビット11)D19〜D18(BIT9とBIT10の間の時間間隔)D17〜D16(BIT8 BIT9間の時間間隔)D15〜D14(ビット7とビット8間の時間間隔) BIT3 BIT4)D5〜D4(BIT2 BIT3間の時間間隔)D3〜D2(BIT1 BIT2間の時間間隔)D1〜D0(BIT0 BIT1間の時間間隔) |
|
38バイト |
| 10 | 0x43 | 擬似ランダムコードクエリ | D4 D3〜D0 | D4:擬似ランダムコードコーディング、範囲1〜2d3:擬似ランダムコードの長さ、2〜16d2 D1:擬似ランダムコードの初期値。これは、擬似ランダムCoded0の長さに応じて低いビットから採取されます:スタンバイ、セット0 0 | 9バイト |
| 11 | 0x44 | 連続照射作業時間設定 | d1 = 00 (H)D0 = yy (H) | YY連続照射時間、ユニットS、タイムアウトは自動的に停止します | 6バイト |
| 12 | 0x45 | 連続露出作業時間クエリ | d1 = 00 (H)D0 = yy (H) | YY連続照射時間、ユニットS、タイムアウトは自動的に停止します | 6バイト |
| 13 | 0x24 | 定期的な照射パラメーター設定 | D2 D1 D0 | D2:作業数cyclesd1:サイクルあたりの作業時間、ユニットSD0:サイクルあたりの休憩時間、 | 7バイト |
| 14 | 0x25 | 周期的な照射パラメータークエリ | D2 D1 D0 | D2:作業数cyclesd1:サイクルあたりの作業時間、ユニットSD0:サイクルあたりの休憩時間、 | 7バイト |
| 15 | 0xeb | 機器番号クエリ | D15〜D0 | D15〜D12:製品モデルD11 D10:製品番号D8:ソフトウェアバージョンD8 D6:Qナンバード5 D4:ドライブナンバーD2:レーザー番号D2:D0:FPGA ID | 20バイト |
| 16 | 0x51 | デバッグモード | D1 D0 | D1:01デバッグモードの入力、00出口DebuggingModed0:Standby | 6バイト |
| 17 | 0x01 | シングルレンジ | D9D8 D7 D6D5 D4 D3D2 D1 D0B4 B3 B2 B1 | D9(BIT7-BIT0)フラグバイト:D9は、メイン波を示す7番目の位置です。 1:メインウェーブがあります。0:メインウェーブはありません。D9はエコーを示す6番目の位置です。 1:ECHOがあります、0:ECHOD9なし5番目のビットはレーザーステータスを示します。 1:通常のレーザー、0:4番目の位置ではレーザー障害d9が無効(0に設定); d9は3番目の位置で無効です(0に設定); d9 2番目の位置はAPD状態を示します。 1:通常、0:ERRORD9は、以前のターゲットがあるかどうかを示す最初の位置です。 1:ターゲットがあります。0:ターゲットなし(メインターゲットの前のターゲットは前のターゲットであり、視覚界のターゲットです)。D90番目のビットは、後続のターゲットがあるかどうかを示します。 1:ターゲットがあります。0:ターゲットはありません(メインターゲットの後のターゲットは後続のターゲットです)D8-D6第1ターゲット距離(ユニット0.1m)D5-D3距離(ユニット0.1m)D2-D0 3番目のターゲット距離(ユニット0.1m)3。目標は近距離からFARB4、B3は高圧値を示しています | 19バイト |
| 18 | 0x02 | 連続的な範囲 | D9 D8 D7D5 D4 D3D2 D1 D0B4 B3 B2 B1 B0 | D9(BIT7-BIT0)フラグバイト:D9は、メイン波を示す7番目の位置です。 1:メインウェーブがあります。0:メインウェーブはありません。D9はエコーを示す6番目の位置です。 1:ECHOがあります、0:ECHOD9なし5番目のビットはレーザーステータスを示します。 1:通常のレーザー、0:4番目の位置(0に設定)でレーザー障害D9は無効です(0に設定); D9は3番目の位置で無効です(0に設定); D9 2番目の位置はAPD状態を示します。 1:通常、0:ERRORD9は、以前のターゲットがあるかどうかを示す最初の位置です。 1:ターゲットがあります。0:ターゲットはありません(メインターゲットの前のターゲットは前のターゲット、視覚界のターゲットです)。D90番目のビットは、後続のターゲットがあるかどうかを示します。 1:ターゲットがあります。0:ターゲットはありません(メインターゲットの後のターゲットは後続のターゲットです)D8-D6第1ターゲット距離(ユニット0.1m)D5-D3距離(ユニット:0.1M)D2-D0 3番目のターゲット距離(ユニット0.1m)3。目標は近距離からFARB4、B3はAPD高圧値を示していますBALEB2はドライブ電流値を示しますB0 B0はレーザーの温度を表します | 19バイト |
| 19 | 0x30 | シャイニング | D9 D8 D7D5 D4 D3D2 D1 D0B4 B3 B2 B1 B0 | D9(BIT7-BIT0)フラグバイト:D9は、メイン波を示す7番目のビットです。 1:メインウェーブがあります。0:メインウェーブはありません。D9はエコーを示す6番目の位置です。 1:ECHOがあります、0:ECHOD9なし5番目のビットはレーザーステータスを示します。 1:通常のレーザー、0:レーザー障害D9は位置4で無効です(0に設定)D9は3番目の位置(0に設定); D9 2番目の位置はAPDステータスを示します。 1:通常、0:ERRORD9は、以前のターゲットがあるかどうかを示す最初の位置です。 1:ターゲットがあります。0:ターゲットなし(メインターゲットの前のターゲットは前のターゲットであり、視覚界のターゲットです)。D90番目のビットは、後続のターゲットがあるかどうかを示します。 1:ターゲットがあります。0:ターゲットはありません(メインターゲットの後のターゲットは後続のターゲットです)D8-D6第1ターゲット距離(ユニット0.1m)D5-D3距離(ユニット:0.1m)D2-D0 3番目のターゲット距離(ユニット0.1m)3。目標は近距離からFARB4、B3はAPD高圧値を示していますBALEB2はドライブ電流値を示しますB0 B0はレーザーの温度を表します | 19バイト |
| 20 | 0xec | 命令エラー | D1 = 00 D0 = 00 | カメラフィードバックコマンドが正しくありません | 6バイト |
| 21 | 0xee | 有効性エラー | D1 = 00 D0 = 00 | カメラのフィードバックが正しくありません | 6バイト |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 注:definedデータバイト/ビット、デフォルトは0です。 | |||||
ホットタグ: 45MJレーザーターゲット指定子(LTD)WIHT LRF、メーカー、サプライヤー、中国、工場、中国製、カスタマイズ、高品質
関連カテゴリー
905nm レーザー距離計モジュール
1535nm レーザーレンジファインダーモジュール
1570nm レーザーレンジファインダーモジュール
1.54umレーザーレンジファインダーモジュール
1064NMレーザーターゲット指定子
アンチドローンSTSTEMモジュール
測距ライダーモジュール
お問い合わせを送信
下記フォームよりお気軽にお問い合わせください。 24時間以内に返信いたします。




WIHT LRF")