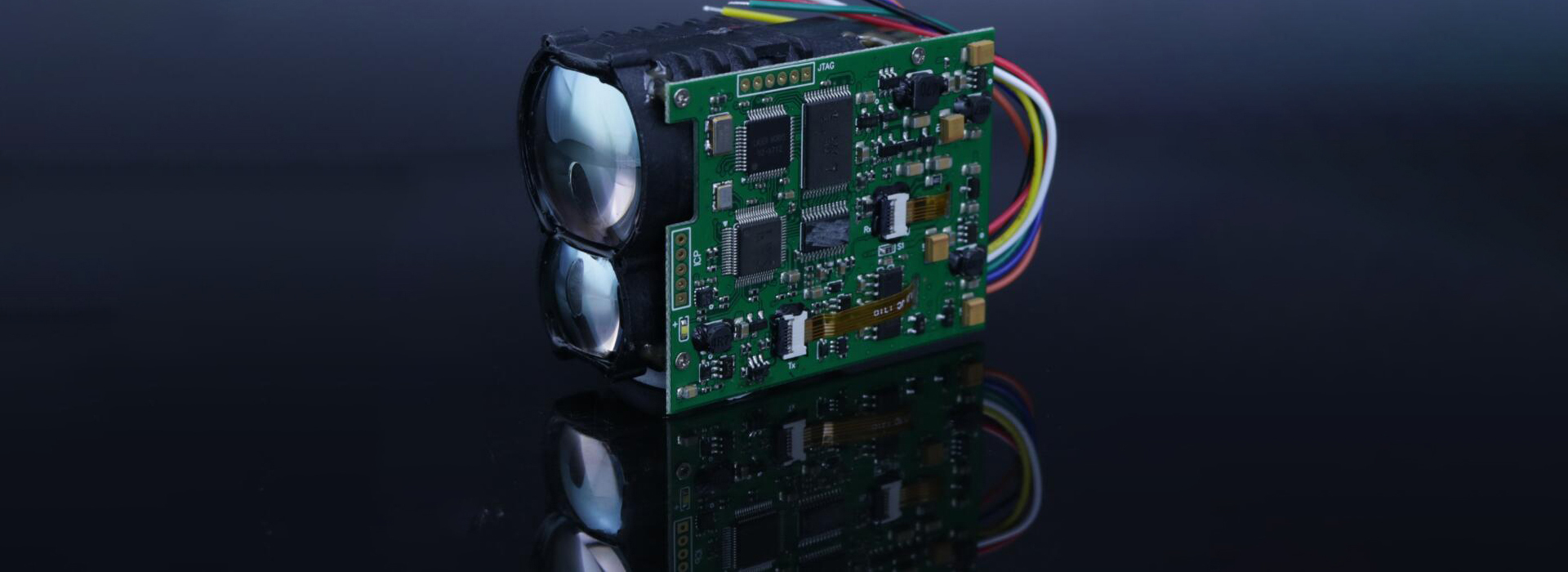







アンチドローンシステム用2mrad 2kmレーザー距離計モジュール
コンパクトな STA-WR2000X レーザー距離計モジュールは、陸海軍の防空システムへの統合に非常に適しています。距離測定モジュールには、可用性が高く、メンテナンスコストが低い最先端のダイオード励起エルビウムガラスレーザーが採用されています。 2mrad の発散角により、断面積 0.1 ㎡の UAV を最大 2000 メートルまで測定できるため、対ドローン システムの重要なコンポーネントとなっています。
お問い合わせを送信
製品説明
1) 単一測距と連続測距。
2) レーザー測距コマンドに応答し、停止コマンドに従っていつでも測距を停止します。
3) 測距中にパルスごとに 1 回、距離データとステータス情報を出力します。
4)送信されたレーザーパルスの累積数を報告できます(パワーダウンの損失はありません)。
5) 距離選択、目標指示の前後。
6) セルフテスト機能。
2) レーザー測距コマンドに応答し、停止コマンドに従っていつでも測距を停止します。
3) 測距中にパルスごとに 1 回、距離データとステータス情報を出力します。
4)送信されたレーザーパルスの累積数を報告できます(パワーダウンの損失はありません)。
5) 距離選択、目標指示の前後。
6) セルフテスト機能。
| 光学インデックス | |
| 波長 | 1535nm±5nm |
| レーザー発散角 | ≤2mrad |
| 有効受信口径 | 56mm |
| 範囲周波数 | シングル、1~10Hz調整可能 |
| 範囲 | 視程 ≥ 12km、ターゲット反射率 ≥ 0.3、湿度 ≤ 80%、UAV 測距距離 (0.25m × 0.25m) ≥ 2km |
| 測距精度 | ≤±1m(RMS) |
| 精度測定 | ≥98% |
| 誤警報率 | 1%以下 |
| 最小測定範囲 | ≤50m |
| レーザー軸の安定性 | ≤0.05ミリラド |
| 光軸は設置基準と平行です | ≤0.3mrad |
| 機械式インジケーター | |
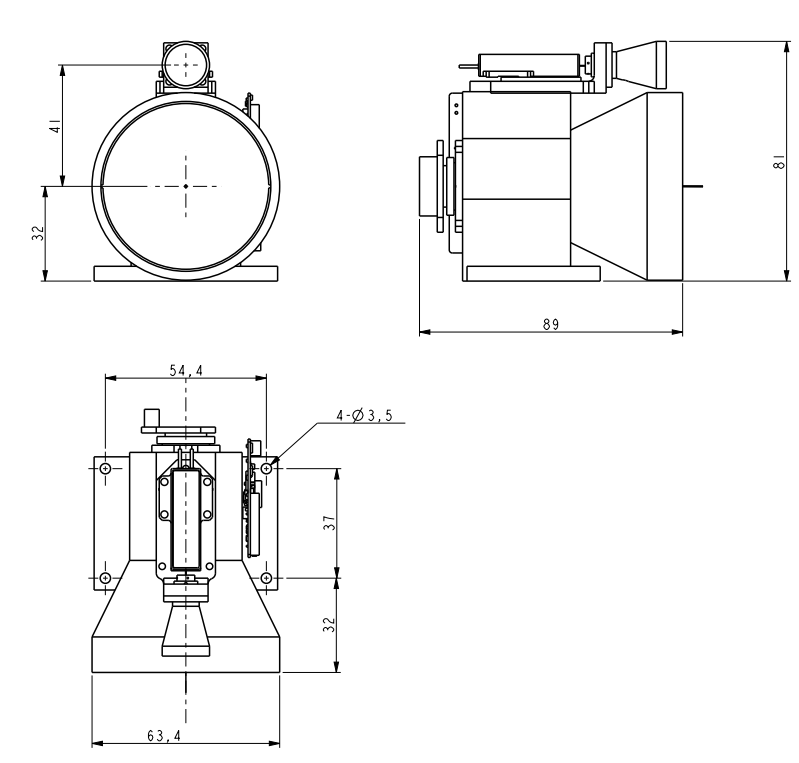
| サイズ | ≤90×63×82mm |
| 重さ | ≤300g |
| 電気インジケーター | |
| 電力を供給する | DC9V~32V |
| 消費電力 | 動作時間は 3W@10Hz 未満、ピーク消費電力は 5W 未満 |
| インタフェース | RS422インターフェース、115200bps |
| 電源オン制御インターフェース | 安全な距離に達したら、電源を入れて使用します。または低電力モードで動作状態を制御します |
| 回路基板の保護 | 回路基板の設計とデバッグが完了したら、耐衝撃塗料を塗布し、「3つの保護」処理を行う必要があります。 |
| 環境適合性 | |
| 使用温度 | -40℃~65℃ |
| 保管温度 | -55℃~70℃ |
| 振動する | GJB150.16 A-2009 「軍事装備研究所の環境試験方法 - 振動試験」 |
| まつげ | GJB150.18 A-2009 「軍事装備研究所の環境試験方法 - 衝撃試験」 |
注記:
1.測距範囲の説明: 範囲はさまざまなテスト条件やテストターゲットの下で変化します。特別なターゲットを検出した場合は、販売側に連絡して確認してください。
2.最小範囲: 30m-100mの変動、通常使用後は50mまで推奨。レーザーエネルギーが大きいため、近距離で使用すると検出器チップが焼ける可能性があります。デバッグの際には、検出器チップが焼けないように適切なミラーカバーをご持参ください。
1.測距範囲の説明: 範囲はさまざまなテスト条件やテストターゲットの下で変化します。特別なターゲットを検出した場合は、販売側に連絡して確認してください。
2.最小範囲: 30m-100mの変動、通常使用後は50mまで推奨。レーザーエネルギーが大きいため、近距離で使用すると検出器チップが焼ける可能性があります。デバッグの際には、検出器チップが焼けないように適切なミラーカバーをご持参ください。
機械構造図
外部インターフェース
| ピン | 意味 | 関数 | 注意事項 |
| 1 | RX+ | RS422レシーバー+ | 青 |
| 2 | RX- | RS422レシーバー+ | 緑 |
| 3 | TX- | RS422伝送 - | 紫 |
| 4 | TX+ | RS422伝送 + | 黄色 |
| 5 | GND | 通信用アース線 | 白 |
| 6 | VEE | 電源+ | 赤 |
| 7 | GND | 電源 - | 黒 |
| 8 | パワージャ | / | 灰 |
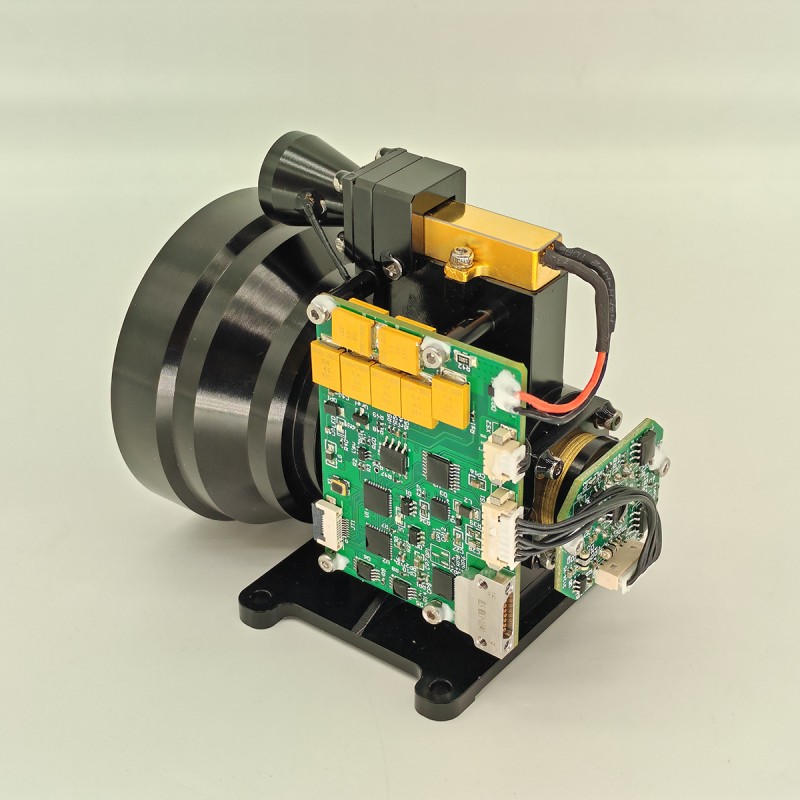
OEM/ODM カウンター無人航空システム (C-UAS) 用 1 ~ 15km レーザー測距モジュール
通信プロトコル
1. 伝送プロトコル: 非同期シリアル通信;
2. ポートレート: 115200;
3. データ ビット: 10 ビット: 1 スタート ビット、8 データ ビット、1 ストップ ビット、無効な検証。
4. データ構造: データはヘッダーバイト、コマンド部、データ長、パラメータ部、チェックバイトで構成されます。
5. 通信モード: マスター コントロールは制御コマンドを測距マシンに送信し、測距マシンはその命令を受信して実行します。測距状態では、測距機は測距周期に従ってデータと測距機の状態を上位コンピュータに送り返す。通信フォーマットとコマンド内容を下表に示します。
A) メインコントロールセンド
2. ポートレート: 115200;
3. データ ビット: 10 ビット: 1 スタート ビット、8 データ ビット、1 ストップ ビット、無効な検証。
4. データ構造: データはヘッダーバイト、コマンド部、データ長、パラメータ部、チェックバイトで構成されます。
5. 通信モード: マスター コントロールは制御コマンドを測距マシンに送信し、測距マシンはその命令を受信して実行します。測距状態では、測距機は測距周期に従ってデータと測距機の状態を上位コンピュータに送り返す。通信フォーマットとコマンド内容を下表に示します。
A) メインコントロールセンド
送信されるメッセージの形式は次のとおりです。
| STX0 | CMD | レン | データ1H | データ1L | CHK |
表 2 送信されるメッセージの形式の説明
| 注文番号 | 名前 | 説明する | コード | 備考 |
| 1 | STX0 | メッセージ開始フラグ | A5(H) |
|
| 2 | CMD | CW | 表3を参照 |
|
| 3 | レン | DL | スタートマーク、コマンドワード、チェックサムを除くすべてのバイト数 |
|
| 4 | データ | パラメータ | 表3を参照 |
|
| 5 | 到着 |
|
||
| 6 | CHK | XOR検証 | 有効なバイトを除き、他のすべてのバイトは XOR 演算されます。 |
|
コマンドは次のように説明されます。
表 3 マスターから測距マシンに送信されるコマンドとデータ ワードの説明
表 3 マスターから測距マシンに送信されるコマンドとデータ ワードの説明
| 注文番号 | CW | 関数 | データバイト | 備考 | 長さ | DC9V~32V |
| 1 | 0x00 | やめる | DATAH=00(H) DATAL=00(H) | 距離計が計測を停止する | 6バイト | A5 00 02 00 00 A7 |
| 2 | www.jioptics.com | 単一測距 | DATAH=00(H) DATAL=00(H) |
|
6バイト | A5 01 02 00 00 A6 |
| 3 | 0x02 | 連続測距 | データH=XX(H) データL=YY(H) | DATA はレンジング期間をミリ秒単位で表します。 | 6バイト | A5 02 02 03 E8 4E (1Hzレンジ) |
| 4 | 0x03 | 自己チェック | DATAH=00(H) DATAL=00(H) |
|
6バイト | A5 03 02 00 00 A4 |
| 5 | 0x04 | 選択範囲への最も近い距離を設定します | データH=XX(H) データL=YY(H) | DATA はブラインド ゾーンの値を示します (単位は 1m) | 6バイト | A5 04 02 00 64 C7(最短距離100m) |
| 6 | 0x06 | 光出力クエリの累計数 | DATAH=00(H) DATAL=00(H) | 光出力クエリの累計数 | 6バイト | A5 06 02 00 00 A1 |
| 7 | 0x11 | APDの電源が入っています | DATAH=00(H) DATAL=00(H) |
|
6バイト | A5 11 02 00 00 B6 |
| 8 | 0x12 | APDの電源がオフになっています | DATAH=00(H) DATAL=00(H) |
|
6バイト | A5 12 02 00 00 B5 |
| 9 | 0xEB | 数値クエリ | DATAH=00(H) DATAL=00(H) | 数値クエリ | 6バイト | A5 EB 02 00 00 4C |
a)メインコントロール受信フォーマット
受信したメッセージの形式は次のとおりです。
受信したメッセージの形式は次のとおりです。
| STX0 | CMD | レン | データ | 日付0 | CHK |
光出力クエリの累計数
| 注文番号 | 名前 | 説明する | コード | 備考 |
| 1 | STX0 | メッセージ開始フラグ1 | A5(H) |
|
| 2 | CMD_JG | データコマンドワード | 表5を参照 |
|
| 3 | レン | DL | スタートマーク、コマンドワード、チェックサムを除くすべてのバイト数 |
|
| 4 | DN | パラメータ | 表5を参照 |
|
| 5 | D0 |
|
||
| 6 | CHK | XOR検証 | 有効なバイトを除き、他のすべてのバイトは XOR 演算されます。 |
|
メインコントロール受信ステータスの説明:
表 5 は、距離計によってマスター コントローラーに送信されるデータ ワードを説明しています。
表 5 は、距離計によってマスター コントローラーに送信されるデータ ワードを説明しています。
| 注文番号 | CW | 関数 | データバイト | 備考 | 全長 |
| 1 | 0x00 | やめる | D1=00(高さ)D0=00(高さ) |
|
6バイト |
| 2 | 0x03 | 自己チェック | D8~D1 | D8-D7: -5V 電圧、単位 0.01V。D6-D5: ブラインド スポット値、単位 1mD4: APD 高電圧値、単位 V;D3: char 型、APD 温度を示す、単位: 摂氏;D2-D1: +5V 電圧、単位 0.01V | 12バイト |
| 3 | 0x04 | 最も近いアクセス設定までの距離、単位 m | D1 D0 | DATA は最も近い距離の値を示します。単位は 1m、高く始まり、低く終わります。 | 6バイト |
| 4 | 0x06 | 光出力クエリの累計数 | CA202 144-202-000-225 Piezoelectric Accelerometer เราจำหน่ายโมดูล PLC, การ์ด DCS, การ์ดระบบ ESD, การ์ดระบบตรวจสอบการสั่นสะเทือน, โมดูลระบบควบคุมกังหัน | DATAはライトの数を表し、上位バイトから4バイトで表されます。 | 7バイト |
| 5 | 0x11 | APDの電源が入っています | D1=00(高さ)D0=00(高さ) | APDの電源が入っています | 6バイト |
| 6 | 0x12 | APD電源オフ | D1=00(高さ)D0=00(高さ) | APDの電源がオフになっています | 6バイト |
| 7 | 0xED | 残業 | 0x00 0x00 | 3) 測距中にパルスごとに 1 回、距離データとステータス情報を出力します。 | 6バイト |
| 8 | 0xEE | 有効性エラー | 0x00 0x00 |
|
6バイト |
| 9 | 0XEF | 1) 単一測距と連続測距。 | 0x00 0x00 |
|
6バイト |
| 10 | www.jioptics.com | 単一距離測定 (単一のターゲット、2 番目と 3 番目のターゲットはゼロ、ターゲットの最初と最後にある 3 番目のターゲットはゼロ) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 第 1 ターゲットまでの距離 (単位 0.1m) D5-D3 第 2 ターゲットまでの距離 (単位 0.1m) D2-D0 第 3 ターゲットまでの距離 (単位 0.1m)3.ゴールは近いものから遠いものまでです。D9 (ビット 7 ~ ビット 0) フラグ バイト: D9 はメイン ウェーブを示す 7 番目の位置です。 1: 主波あり、0: 主波なし。D9 はエコーを示す 6 番目の位置です。 1: エコーあり、0: エコーなしD9 5 番目の位置はレーザーのステータスを示します。 1: 通常のレーザー、0: レーザー障害D9 はタイムアウト フラグの 4 番目のビットです、1: 通常、0: タイムアウトD9 の 3 番目の位置は無効です (1 に設定)。D9 2 番目の位置は APD ステータスを示します。 1: 通常、0: エラーD9 は、前のターゲットが存在するかどうかを示す最初の位置です。 1: 前のターゲットが存在する、0: 前のターゲットが存在しない (ブラインドエリアにターゲットがある)。D9 0 番目のビットは、次のターゲットが存在するかどうかを示します。 1:後続ターゲットあり、0:後続ターゲットなし(メインターゲットの次のターゲットが後続ターゲット) | 14バイト |
| 11 | 0x02 | 連続測距 (単一のターゲット、2 番目と 3 番目のターゲットはゼロ、ターゲットの最初と最後にある 3 番目のターゲットはゼロ) | RS422インターフェース、115200bps | D8-D6 第 1 ターゲットまでの距離 (単位 0.1m) D5-D3 第 2 ターゲットまでの距離 (単位 0.1m) D2-D0 第 3 ターゲットまでの距離 (単位 0.1m)3.目標は近いものから遠いものまでです。D9 (ビット 7 ~ ビット 0) フラグ バイト: D9 はメイン ウェーブを示す 7 番目のビットです。 1: 主波あり、0: 主波なし。D9 はエコーを示す 6 番目の位置です。 1: エコーあり、0: エコーなしD9 5 番目の位置はレーザーのステータスを示します。 1: 通常のレーザー、0: レーザー障害D9 はタイムアウト フラグの 4 番目のビットです、1: 通常、0: タイムアウトD9 の 3 番目の位置は無効です (1 に設定)。D9 2 番目の位置は APD 状態を示します。 1: 通常、0: エラーD9 は、前のターゲットが存在するかどうかを示す最初の位置です。 1: 前のターゲットが存在する、0: 前のターゲットが存在しない (ブラインドエリアにターゲットがある)。D9 0 番目のビットは、次のターゲットが存在するかどうかを示します。 1:後続ターゲットあり、0:後続ターゲットなし(メインターゲットの次のターゲットが後続ターゲット) | 14バイト |
| 12 | 0xEB | 数値クエリ | D17……D0 | D17 D16 D15 D14 D13 D12 マシン全体のモデル コードD11D10 製品番号D9 D6 ソフトウェア バージョンD5 D4 APD 番号D3 D2 レーザー番号FPGA のバージョン D1 | D17……D0 |
| 注: ① 未定義のデータ バイト/ビット、デフォルトは 0。 | |||||
ホットタグ: 2mrad 2km レーザー距離計モジュール、アンチドローン ststem、メーカー、サプライヤー、工場、中国、中国製、カスタマイズ、高品質
関連カテゴリー
905nm レーザー距離計モジュール
1535nm レーザーレンジファインダーモジュール
1570nm レーザーレンジファインダーモジュール
1.54umレーザーレンジファインダーモジュール
1064NMレーザーターゲット指定子
アンチドローンSTSTEMモジュール
測距ライダーモジュール
お問い合わせを送信
下記フォームよりお気軽にお問い合わせください。 24時間以内に返信いたします。