2kmマイクロレーザー距離計モジュール
STA-D20X小型レーザー測距モジュールは905nm半導体レーザーを使用しており、長距離、低消費電力、小型、目の安全性の特性を備えています。小型無人航空機ポッド、手持ち式暗視装置、赤外線画像装置、その他の機器の統合に非常に適しています。
お問い合わせを送信
製品説明
最大範囲: 2000m
測距精度:±1m
測距周波数:単発測距、1Hz、2Hz
重量:10g±0.5g
主な特徴:
半導体レーザー技術: 従来の飛行時間型 (TOF) 距離計よりも優れた信頼性、コンパクトさ、低消費電力により、ポータブル機器やスペースに制約のある機器への統合が可能になります。
製品性能指数
| シリアルナンバー | プロジェクト名 | STA-D20X |
| 1 | 人間の目の安全性 | はい |
| 2 | レーザー波長 | 905nm |
| 3 | レーザー発散角 | 1×6mrad |
| 4 | 受信視野 | ~20mrad |
| 5 | 送信機の口径 | Φ10×7.5mm |
| 6 | 受信口径 | Φ15×10mm |
| 7 | 測距範囲 | 5~2000m |
| 8 | 測距精度 | ±1m |
| 9 | 測定周波数 | 単発測距、1Hz、2Hz |
| 10 | 正解率 | ≥98% |
| 11 | 誤警報率 | ≤1% |
| 12 | データインターフェース | UART(TTL_3.3V) |
| 13 | 電源電圧 | 最大範囲: 2000m |
| 14 | 消費電力 | スタンバイ: ≤0.6W@3.3V;作業時: ≤1W@3.3V; |
| 15 | ||
| 16 | 重み | 10±0.5g |
| 17 | サイズ(長さ×幅×高さ) | UART(TTL_3.3V) |
| 18 | 動作温度 | -20~+60℃ |
| 19 | 保管温度 | -30~+60℃ |
| 20 | ショック | 1200g、1ms |
| 21 | 振動 | 5~50~5Hz、1オクターブ/分、2.5g |
| 22 | 信頼性 | MTBF≧1500h |
| 23 | 起動時間 | ≤200ミリ秒; |
| 24 | 電気インターフェース | ソケット:0.8WTB-6AB-01プラグ:0.8WTB-6Y-2 |
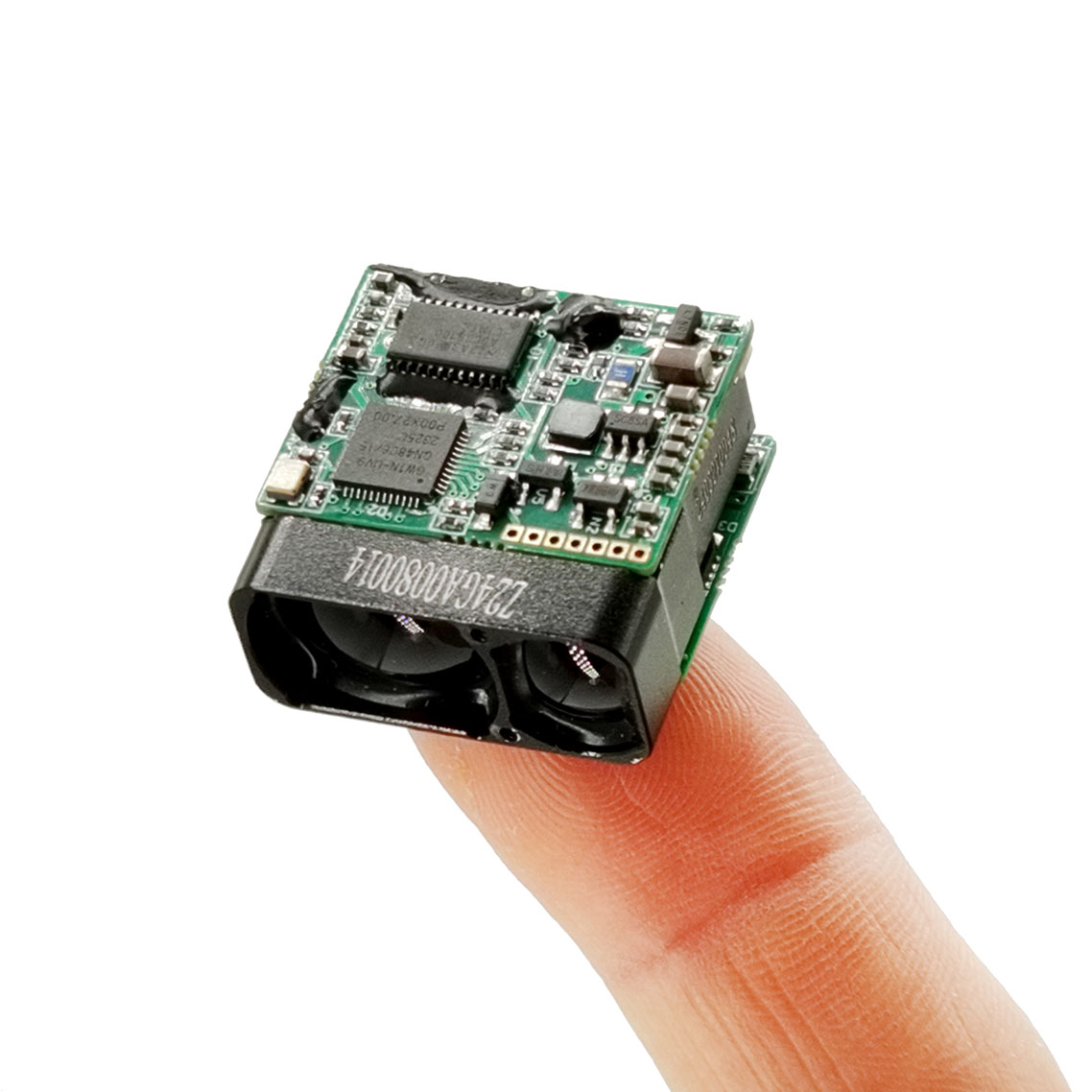
モジュール構成
レーザー距離計製品の主なコンポーネントは次のとおりです。
a) コンポーネントの受信および送信。
b) 回路部品;26mm×25mm×13.5mm(L×W×H)、重量は≤10g±0.5g、外観は図1に示されています。
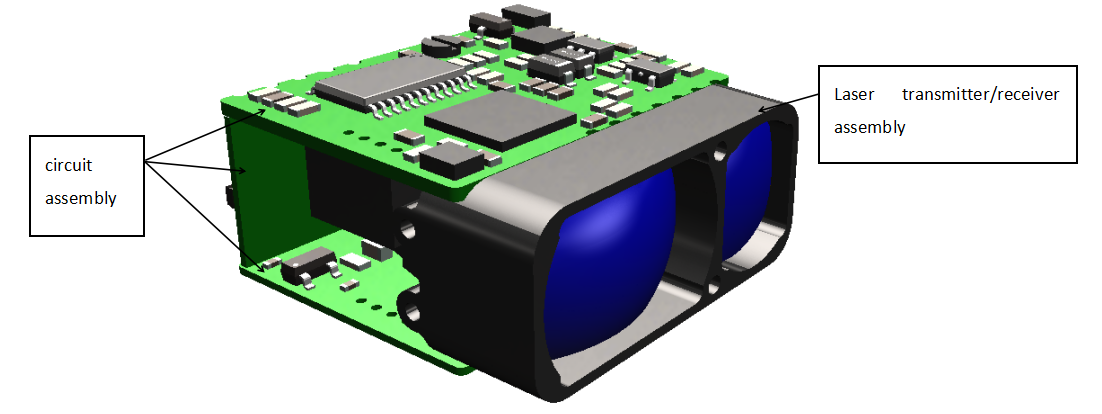
図1 製品外観
構造物の設置インターフェース
機械的インターフェースと光学的インターフェースの外形寸法を図 2 に示します。
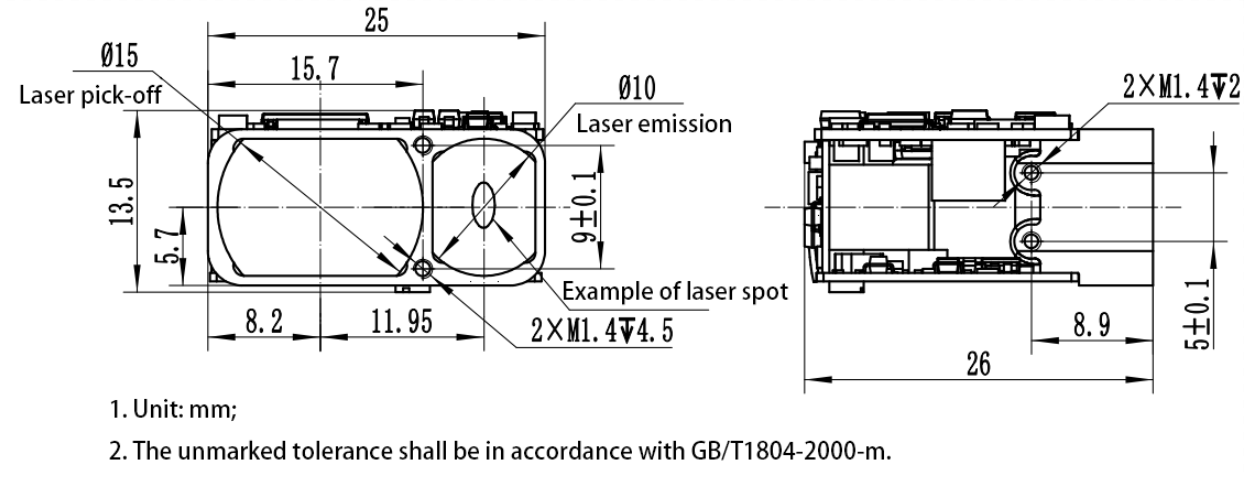
図 2 機械的および光学的インターフェースの図
電気インターフェース
電気インターフェイスの要件は次のとおりです。
a)電源電圧:3V〜5.5V(通常値3.3Vまたは5V)。
b) スタンバイ消費電力: ≤ 0.8W;
c) 平均消費電力: ≤ 1W。
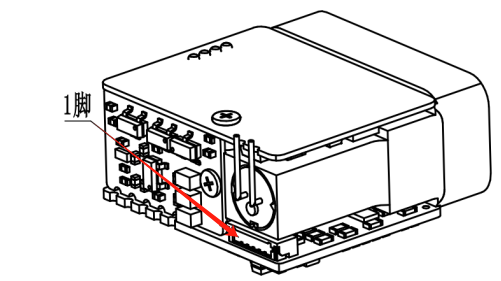
d) 上部コンピュータ端は、0.8WTB-6Y-2 コネクタを介して距離測定機端 0.8WTB-6AB-01 コネクタ (Yueqing Huabao) との架橋テストを実現します。距離計側の電源および通信ポートのピンの定義を表 1 に示し、コネクタのピンの位置を図 3 に示します。
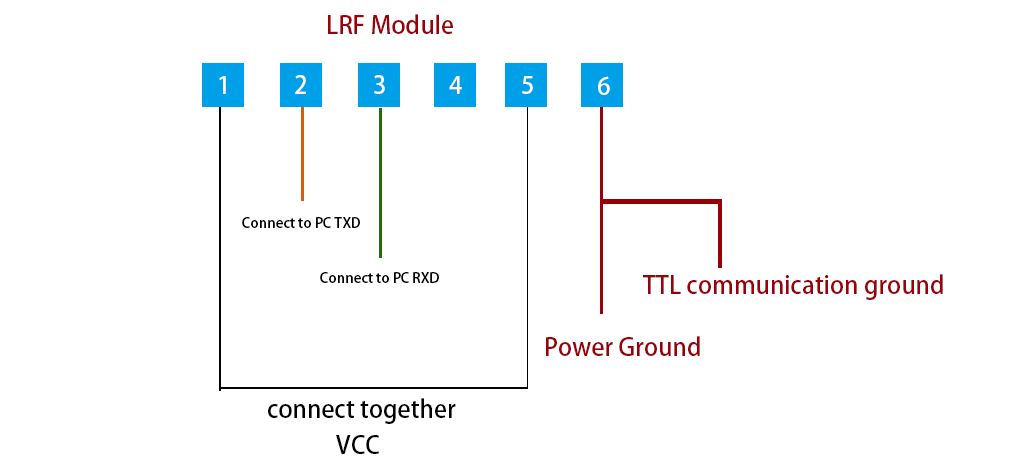
表 2 製品の電気ピンの定義
| ピン | ラベリング | 電気的特性の定義 | 信号の方向 |
| 1 | パワーEN | ||
| 2 | 10±0.5g | 信号入力ポート | ホストコンピュータから距離計へ |
| 3 | TTL_TXD | 信号出力ポート | 距離計からホストコンピュータへ |
| 4 | ノースカロライナ州 | ||
| 5 | 電源+ | ||
| 6 | グランド |
電気接続図
モジュール通信
データ
u ボーレート: 115200bps;
u シングルバイト送信フォーマット: 1 スタート ビット、8 データ ビット、チェックなし、1 ストップ ビットを含み、8 ビット データは最初に Low で送信され、次に High で送信されます。
Freq
単一の測距コマンド
注: 検証コード = バイト 3 + バイト 4 + バイト 5 + バイト 6 + バイト 7 を送信します。
受信した検証コード = バイト 1 + バイト 2 + バイト 3 + バイト 4 + バイト 5 + バイト 6 + バイト 7。
測距モジュールに送信する
| バイト | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 説明 | 0x88 | 0xAA | 0x88 | 0xFF | 0xFF | 0xFF | 0xFF | チェックコード |
| バイト | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 説明 | 0x55 | 0xAA | 0x88 | 状態 | 0xFF | データ_H | データ_L | チェックコード |
ステータス = 0、単一の測定は失敗します。 DATA_H=0xFF、DATA_L=0xFF; status=1、単一の測定は成功します。 DATA_H=測定結果の上位バイト。 DATA_L=測定結果の下位バイト。
連続測距コマンド
注: 検証コード = バイト 3 + バイト 4 + バイト 5 + バイト 6 + バイト 7 を送信します。
受信した検証コード = バイト 1 + バイト 2 + バイト 3 + バイト 4 + バイト 5 + バイト 6 + バイト 7。
測距モジュールに送信する
| バイト | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 説明 | 0x88 | 0xAA | 周波数 | 0xFF | 0xFF | 0xFF | 0xFF | チェックコード |
| バイト | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 説明 | 0x55 | 0xAA | 周波数 | 状態 | 0xFF | データ_H | データ_L | チェックコード |
ステータス = 0、連続測定は失敗します。 DATA_H=0xFF、DATA_L=0xFF; status=1、連続測定は成功します。 DATA_H=測定結果の上位バイト。 DATA_L=測定結果の下位バイト。
レンジングの場合は Freq=0x89,1Hz。レンジングの場合は Freq=0xA9,2Hz。レンジングの場合は Freq=0xB9,5Hz。軸校正モードの場合は Freq=0xF9 (軸校正命令受信後に軸ステータスを 1 回返信します)。
測定を停止する
測距モジュールに送信します。
| バイト | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 説明 | 0x88 | 0xAA | 0x8E | 0xFF | 0xFF | 0xFF | 0xFF | チェックコード |
測距モジュールは次を返します。
| バイト | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 説明 | 0x88 | 0xAA | 0x8E | 状態 | 0xFF | 0xFF | 0xFF | チェックコード |
ステータス = 0、連続測定を終了できませんでした。 status=1、連続測定は正常に終了しました。
注: データは 16 進数で返され、すべてのデータ結果は実際のデータを 10 倍して出力されます。
例: dist=2000.3m の場合、出力データは 20003 となり、16 進数に変換すると 4E23、つまり Data1=0x4E、Data2=0x23 となります。
ホットタグ: 2km マイクロレーザー距離計モジュール、メーカー、サプライヤー、工場、中国、中国製、カスタマイズされた、高品質
関連カテゴリー
905nm レーザー距離計モジュール
1535nm レーザーレンジファインダーモジュール
1570nm レーザーレンジファインダーモジュール
1.54umレーザーレンジファインダーモジュール
1064NMレーザーターゲット指定子
アンチドローンSTSTEMモジュール
測距ライダーモジュール
お問い合わせを送信
下記フォームよりお気軽にお問い合わせください。 24時間以内に返信いたします。





")