")

1200mミニレーザーレンジファインダーモジュール(LRF)
STA-Mシリーズミニチュアレーザーレンジャーファインダーモジュールは、熱イメージング、ナイトビジョン、その他のハンドヘルドモバイルデバイス、および小型化されたUAVポッド装置の統合に適した、低電力消費、小型、安定した性能、その他の特性を備えた905nmの半導体レーザーコンポーネントを採用しています。
測定範囲:5〜1200メートル
1000メートル以上の木の測定
測定精度±1m
重量≤14±0.5g
お問い合わせを送信
製品説明
技術的なパラメーターを次の表に示します
| モデル | STA-M010X | |
| レーザー波長 | 905nm | |
| 範囲の機能 | 建物 | 1200m |
| 木 | 1000m | |
| レーザーグレード | クラス1の眼の安全 | |
| ミニレンジ | 5m | |
| 解決 | ±0.1m | |
| 動作電流 | ≤90mA | |
| スタンバイ電流 | ≤20ma | |
| 消費電力 | スタンバイ以下0.09W | |
| ピーク以下0.23W | ||
| 通信インターフェイス | TTL | |
| 動作温度 | ・-20℃〜+55℃ | |
| 保管温度 | ・-30℃〜+60℃ | |
| 入力電圧 | 3-5V(推奨5V電源) | |
| ビーム発散角 | 5つの病気 | |
| 範囲の周波数 | 1-3Hz | |
| 力 | 人間の目に安全な≤1MW | |
| レンジングメソッド | 脈 | |
| 重さ | 14±0.5g | |
| サイズ | φ23x47mm | |
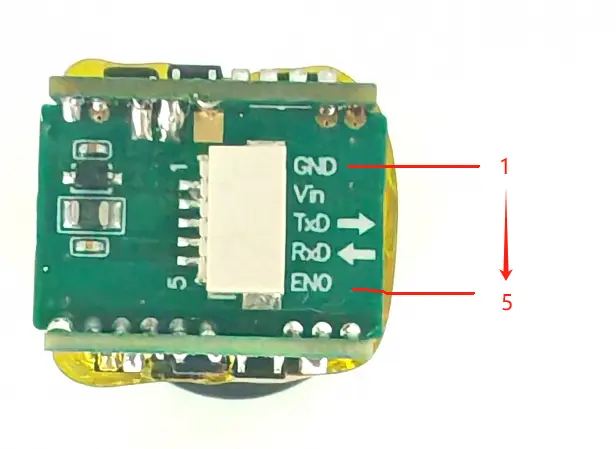
インターフェイスとピンは、次の表に示すように定義されています
| TTLインターフェイス | |||
| ピン | ピン定義 | 説明する | 概略図 |
| 1 | GND | 電源 - |
|
| 2 | ヴィン | 電源 + | |
| 3 | TXD | データを送信します | |
| 4 | RXD | 受信したデータ | |
| 5 | イーノ | PINを有効にし、予約します | |
|
|
|
|
|
モジュール通信コマンドチャート
| マスターコマンド | ||
| コマンドコード | 説明 | ブロードキャスト追加。応答 |
| 0x80 | RangeFinderステータスを読み取ります | いいえ |
| 0x81 | 測定結果を読んでください | いいえ |
| 0x83 | 範囲を開始します | いいえ |
| 0x84 | 並べるのをやめなさい | いいえ |
| 0x9e | 通信パラメータープログラム | はい |
| 0xbe | 通信パラメーターをお読みください | はい |
| 0xc0 | 通信テスト | はい |
| 0xc1 | ファームウェアバージョンをお読みください | はい |
|
|
|
|
| 奴隷の対応 | ||
| 認識コード | 説明 | |
| 0x60 | 簡単な回答フレーム | |
| 0x01 | 範囲データフレーム | |
| 0x20 | レンジファインダーステータスフレーム | |
| 0x21 | 通信パラメーターフレーム | |
| 0xe0 | エラーメッセージフレーム | |
注記
1。通信フレーム形式:
Slaveid + instruction +パラメーター +チェックサム
2。2つの隣接するフレーム間の間隔は、少なくとも1.5バイトの時間でなければなりません
1MS未満の場合、1MSと見なされます。
600bps:25ms
1200bps:12.5ms
2400bps:6.25ms
4800bps:3.125ms
9600bps:1.56ms
19200bps:1ms(0.78ms <1ms、1msを取る)
3.チェックサムの計算を送信します。
このモジュールは、バイトの蓄積合計によってバイトの検証モードを使用します、Slaveidはそうではありません
検証に含まれ、最後にチェックサムを送信しました。
スキャンモード命令のチェック合計 "0x83 0x40"などの計算など:
A.計算蓄積合計:0x83 + 0x40 = 0xc3;
b.take lsb [d7..d0]:0xc3;
C.Calculate 2の補数:0x100-0xc3 = 0x3d、0x3dはチェックサムです。
マターが送信されたときにスレーブアドレスを追加:0x10 0x83 0x40 0x3d
4。検証領収書。
通信フレームを受信するなど:0x10 0x83 0x40 0x3d、検証
スレーブアドレス0x10
A.計算蓄積合計:0x83 + 0x40 + 0x3d = 0x100;
b.Acumulation SumのLSBをテイク:0x00; 0x00は確認結果です。
検証結果が0x00の場合、それは受信したデータが正しいことを意味します。検証結果の場合
0x00ではありません。これは、受信したデータが間違っていることを意味します。
モジュールコマンドの説明
注:例では、各コマンドのスレーブアドレスは0x10です。アプリケーションでは、スレーブアドレスがプログラムされたものになります。
1、通信テスト(0xc0 );
| マスターは送信します | ||
| コマンドコード | パラメーター | 説明 |
| 0xc0 | なし |
|
| スレーブの反応 | ||
| 認識コード | パラメーター | 説明 |
| 0x60 | なし |
|
| 例 | ||
| マスター送信:0x10 0xc0 0x40; 0x40はチェックサムです スレーブの応答:0x10 0x60 0xa0; 0xa0はチェックサムです |
||
2、コマンドスレーブ範囲を開始する(0x83);
| マスターは送信します | ||
| コマンドコード | パラメーター | 説明 |
| 0x83 | byte1 | D7:予備 |
| D6:連続距離モード、0 = OFF; 1 = on; | ||
| D5:フォグモード、0 =オフ; 1 = on; | ||
| D4:データユニット、0 =メーター。 1 =ヤード; | ||
| D3 -D0:作業モード、0 =範囲; 1 =速度; 2 =小さなターゲットモード。 | ||
| スレーブの反応 | ||
| 認識コード | パラメーター | 説明 |
| 0x60 | なし | スレーブが自動エクスポートモードとして設定されている場合、スレーブは最初に0x60を最初に応答し、開始範囲コマンドを受信した後、範囲が終了した後、範囲の結果を送信します。 |
| 例 | ||
| マスター送信: 0x10 0x83 0x00 0x7d:モード0は単一の測定用で、データユニットはメーターです。 0x10 0x83 0x40 0x3d:モード0は連続的な排便用で、データユニットはメーターです。 0x10 0x83 0x10 0x6d:モード0は単一の測定用で、データユニットはヤードです。 0x10 0x83 0x20 0x2d:モード0は連続的な排便用で、データユニットはヤードです。 奴隷反応: 0x10 0x60 0xa0; |
||
注記:1.モジュールデータエクスポート方法がクエリモードとして設定されている場合、単一の測定のみを実行できます。
2.速度モードでは、連続範囲の関数がnullであり、連続速度測定ではありません。
3.フォグモードは、FOGモード機能を備えたデバイスに対してのみ有効です。
4.Slaveは、Start Rangingコマンドを受信した後、0x60応答フレームを送信します。レンジが終了した後、範囲の結果が送信され始めます。
3、コマンドスレーブストップレンジ(0x84);
| マスターは送信します | ||
| コマンドコード | パラメーター | 説明 |
| 0x84 | なし |
|
注:マスターが奴隷にコマンドを送信して連続的な範囲を行うと、このコマンドをスレーブに送信して範囲を停止する必要があります。マスターが1回の時間範囲を実行するためにスレーブにコマンドを送信する場合、このコマンドを送信する必要はありません。
4、奴隷ステータスを読む(0x80)
| マスターは送信します | ||
| コマンドコード | パラメーター | 説明 |
| 0x80 | なし |
|
| スレーブの反応 | ||
| 認識コード | パラメーター | 説明 |
| 0x20 | byte1 | d7:1 =レンジファインダービジー; 0 =範囲が終了します。 d6:1 = rangefinderの誤動作。 0 =誤動作なし。 D5-D2:予備。 D1:0 =角度センサーが禁止されています。 1 = Angle Senser Enabled; D0:0 =角度センサーは正常です。 1 =異常角度センサー。 |
| byte2 | 予約する | |
5、読み取り範囲ファインダー結果(0x81);
| マスターは送信します | |
| 説明 |
|
|
|
|
| スレーブの反応 | |
| 説明 |
|
| D7 ::距離データ、0 =データ有効; 1 =無効なデータ。 d6 ::角度データ、0 =データ有効; 1 =無効なデータ。 D5:データ解像度、0 = 0.5/LSB; 1 = 0.1/LSB; D4:データユニット、0 =メーター。 1 =ヤード; D3 -D0:作業モード、0 =範囲; 1 =速度; |
|
| 距離が有効な場合:距離[D15..D8]; 距離が無効な場合:0x80 =結果はありません。 0x81 =システムエラー; |
|
| 角度が有効な場合:距離[d7..d0]; 角度が無効な場合:予備。 |
|
|
|
|
| 例 | |
| 1、スレーブ送信距離フレーム:0x10 0x01 0x60 0x12 0xd7 0xb6 距離値= 0x12d7 = 4823 = 482.3m 2、スレーブは速度フレームを送信します:0x10 0x01 0x21 0x03 0xd7 0x04 速度値= 0x03d7 = 983 = 98.3km/h 3、スレーブは距離フレームを送信します:0x10 0x01 0xe0 0x80 0x00 0x9f 距離値は無効です(最初のバイトは0xe0、d7 = 1です) |
|
6、奴隷コミュニケーションボーレート(0x9e)を書く、工場の設定は19200bpsです;
| マスターは送信します | ||
| コマンドコード | パラメーター | 説明 |
| 0x9e | byte1 | 0x90でなければなりません |
| byte2 | 予約する | |
| byte3 | 予約する | |
| byte4 | ボーレート設定: 0 = 1200bps; 1 = 2400bps; 2 = 4800bps; 3 = 9600bps; 4 = 19200bps(デフォルト); |
|
| スレーブの反応 | ||
| 認識コード | パラメーター | 説明 |
| slaveスレーブパラメーターを読む奴隷応答部分を参照してください) | ||
| 例 | ||
| マスターがフレームを送信する場合:0x10 0x9e 0x90 0x00 0x00 0x04 0xce;それは意味します:奴隷のボーレートを19200bpsに設定します、 | ||
注:新しいボーレートは、モジュールが再起動された後にのみ有効です。
7、奴隷住所を書く(0x9e)、工場の設定:0x10;
| マスターは送信します | ||
| コマンドコード | パラメーター | 説明 |
| 0x9e | byte1 | 0x91でなければなりません |
| byte2 | 予約する | |
| byte3 | 予約する | |
| byte4 | 奴隷の新しい住所; | |
| スレーブの反応 | ||
| 認識コード | パラメーター | 説明 |
| slaveスレーブパラメーターを読む奴隷応答部分を参照してください) | ||
| 例 | ||
| スレーブアドレスを0x20として記述するには、マスターが送信します:0x10 0x9e 0x91 0x00 0x00 0x20 0xb1 | ||
注記:1.デバイスが再起動された後、新しいスレーブアドレスは有効です
2。0x00はブロードキャストアドレスであるため、スレーブアドレスを0x00として設定することはできません。
3.デフォルトのスレーブアドレスは0x10です。
8、書き込み測定結果輸出方法(0x9e);
| マスターは送信します | ||
| コマンドコード | パラメーター | 説明 |
| 0x9e | byte1 | 0x92でなければなりません |
| byte2 | 予約する | |
| byte3 | 予約する | |
| byte4 | 測定された結果エクスポート方法selecttiong: 0 =クエリモード(スレーブは、マスターが読書コマンドを送信する場合にのみデータをエクスポートできます) 1(デフォルト)=自動モード(範囲が終了した後、自動的にデータを送信します)。 |
|
| スレーブの反応 | ||
| 認識コード | パラメーター | 説明 |
| slaveスレーブパラメーターを読む奴隷応答部分を参照してください) | ||
| 例 | ||
| データエクスポートを自動エクスポートに変更するには、マスターが送信されます:0x10 0x9e 0x92 0x00 0x00 0x01 0xcf | ||
9、uart io電圧(0x9e)、工場設定:3.3V;
| 例 | ||
| コマンドコード | パラメーター | 説明 |
| 0x9e | byte1 | 0x93でなければなりません |
| byte2 | 予約する | |
| byte3 | 予約する | |
| byte4 | UART IO電圧設定:72-199、0.025V/LSB; | |
| スレーブの反応 | ||
| 認識コード | パラメーター | 説明 |
| slaveスレーブパラメーターを読む奴隷応答部分を参照してください) | ||
| 例 | ||
| UART IO電圧を3.3Vに変更してから、マスター送信:0x10 0x9e 0x93 0x00 0x00 0x84 0x4b | ||
注:VIO =設定 * 0.025V、デフォルトVIO = 3.3V
10、通信パラメーターの読み取り(0xbe);
| マスターは送信します | ||
| コマンドコード | パラメーター | 説明 |
| 0xbe | byte1 | 0x91または0x92である必要があります |
| スレーブの反応 | ||
| 認識コード | パラメーター | 説明 |
| 0x21 | byte1 | スレーブアドレス:0x01-0xff |
| byte2 | D4:データエクスポート方法。 D3 -D0:ボーレート設定。 |
|
| byte3 | UART IO電圧設定 | |
11、スレーブは間違った情報を送信します(0xe0 );
| スレーブの反応 | ||
| 認識コード | パラメーター |
|
| 0xe0 | byte1 | D7 -D3:予備。 D2:1 =通信パラメーターエラー。 D1:1 =認識できない通信。 D0:1 =チェックサムエラー。 |
12はファームウェアバージョンを読む(このコマンドはv7.00以下でのみサポートされていました;);
| マスターは送信します | ||
| コマンドコード | パラメーター |
|
| 0xc1 | なし |
|
| スレーブの反応 | ||
| 認識コード | パラメーター | メモ |
| 0x61 | byte0 | 5月バージョン(BCD) |
| byte1 | マイナーバージョン(BCD) | |
| 例 | ||
| スレーブ応答:0x10 0x61 0x07 0x00 0x98 データ「0x07 0x00」は、ファームウェアバージョンがv7.00であることを意味します。 |
||
ホットタグ: 1200mミニレーザーレンジファインダーモジュール(LRF)、メーカー、サプライヤー、工場、中国、中国製、カスタマイズ、高品質
関連カテゴリー
905nm レーザー距離計モジュール
1535nm レーザーレンジファインダーモジュール
1570nm レーザーレンジファインダーモジュール
1.54umレーザーレンジファインダーモジュール
1064NMレーザーターゲット指定子
アンチドローンSTSTEMモジュール
測距ライダーモジュール
お問い合わせを送信
下記フォームよりお気軽にお問い合わせください。 24時間以内に返信いたします。





")