1535nm 3km 小型レーザー測距モジュール
STA-AM30X レーザー測距モジュールは、飛行時間 (TOF) テクノロジーを利用して、10 メートルから 4000 メートルまでの正確な距離測定を実現します。 1Hz ~ 10Hz の範囲の周波数をサポートし、UART (TTL 3.3V) 通信インターフェイスを備えています。単発測距、連続測距、最初/最後の目標認識、複数目標測距などの機能を備えており、高精度な距離測定用途に適しています。
お問い合わせを送信
製品説明
技術仕様
| プロジェクト | ±1 m | |
| モデル | STA-AM30X | |
| ±1 m | レーザー波長 | 1535±5nm |
| 目の安全性 | クラスⅠ(IEC 60825-1) | |
| 発散角 | ≤0.6mrad | |
| レーザーエネルギー | ≧100μJ | |
| 視野 (FOV) | ~7.4mrad | |
| 最大測定範囲(視程 > 8km) | ≥ 4000m @ 60% 反射率、建物ターゲット | |
| ≥3000m @ 30% 反射率、2.3×2.3m ターゲット | ||
| ≥1500m @ 30% 反射率、0.5×1.7m ターゲット | ||
| ≥800m @ 30% 反射率、0.2×0.3m ターゲット | ||
| 最小範囲 | ≤10m | |
| 測距周波数 | 1Hz~10Hz | |
| 複数のターゲットの検出 | ターゲットは最大3つまで | |
| 測距精度 | ±1m | |
| 正解率 | ≥98% | |
| 誤警報率 | 1%以下 | |
| 2.13 FPGA ソフトウェアのバージョン番号を問い合わせる | インターフェースの種類 | UART(TTL3.3V) |
| 電源電圧 | DC3~5V | |
| 待機時消費電力(全温度範囲) | ≤10mW (電源投入時プルロー) | |
| ≤0.8W (電源投入時にプルハイ) | ||
| 動作消費電力(全温度範囲) | 5V.≤0.9W@1Hz | |
| 5V、<1。 5W@10Hz | ||
| ピーク消費電力 | STA-AM30X | |
| 起動時間 | ≤350ms (起動後、応答時間≤20ms) | |
| 身体的特徴 | 重さ | ≤ 141g |
| 寸法 | ≤ 27×25×15.5mm(長さ×幅×高さ) | |
| ショック | 1200g、1ms | |
| 振動 | 5~50~5Hz、1オクターブ/分、2.5g | |
| 環境適応力 | 動作温度 | -40~+70℃ |
| 保管温度 | -45~+70℃ | |
| 信頼性 | 起動時間 | |
外形寸法(mm)
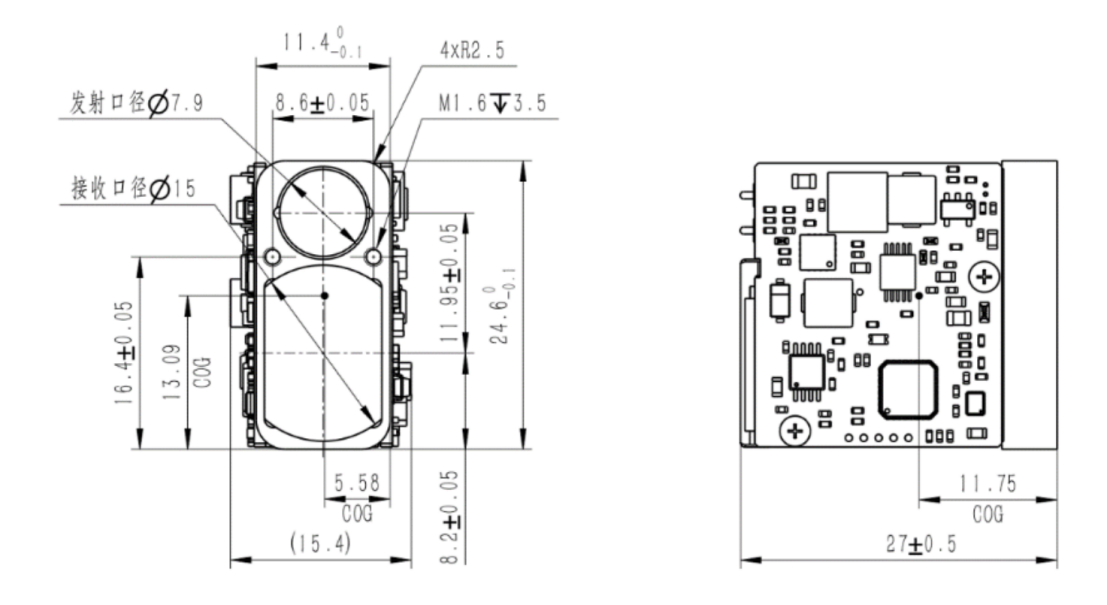
推奨される取り付けブラケットの寸法は次のとおりです。

設置図:

PINインターフェース
インターフェースタイプ: UART (TTL 3.3V)
コネクタモデル: FWF08002-S06B13W5M (Tesga コネクタ)
| ピン | 意味 | 説明 | |
| 1 | パワーオン | モジュール電源スイッチ、TTL 3.3V レベル、モジュールオン (>2.7V)、モジュールオフ (<0.3V) | |
| 2 | UART_TX | シリアルポートレシーバー、TTL 3.3Vレベル | |
| 3 | UART_TX | シリアルポートトランスミッター、TTL 3.3Vレベル | |
| 4 | ノースカロライナ州 | ||
| 5 | パワーポジティブ | 電源、3~5V | |
| 6 | GND | シリアルポートグランド |
ケーブルの定義:
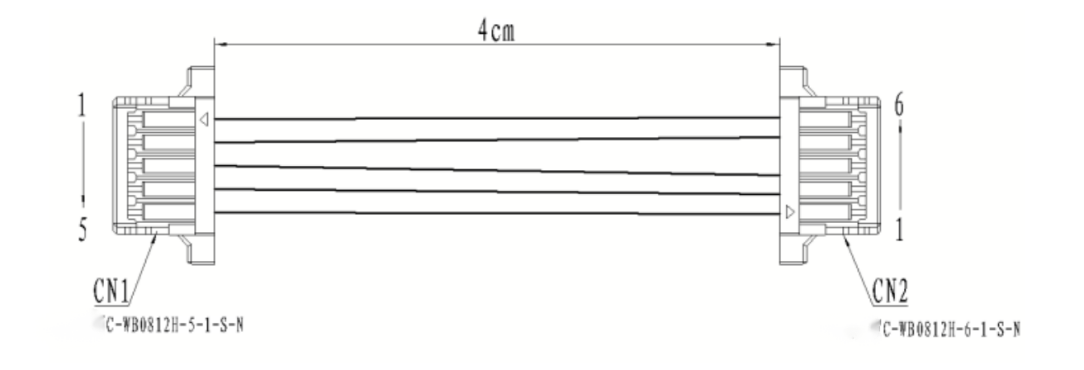
一致するケーブルのピン配置:
| CN1(C-WBO812H-5-1-S-N) | CN2(C-WBO812H-6-1-S-N) | ケーブル仕様 | 色 |
| 1 | 6 | AWG32 | 黒 |
| 2 | 5 | AWG32 | 赤 |
| 3 | 3 | AWG32 | 黄色 |
| 4 | 2 | AWG32 | 緑 |
| 5 | 1 | AWG32 | 白 |
組み込みソフトウェア
1 プロトコルの説明
1.1 通信速度と通信フォーマット
| フォーマット規格 | ボーレート: 115200bps (工場出荷時のデフォルト) / 57600bps / 38400bps / 9600bpsバイトデータ形式: 1 スタートビット、8 データビット、1 ストップビット、検証なし |
1.2 基本的なパケットフォーマット
| セクションの説明 | セクション長(バイト数) | 値の範囲 | 備考 |
| フレームヘッダー | 2 | 0xEE 0x16 | 固定値 |
| データ長 | 1 | 2~7 | データ長は、デバイスコード、コマンドコード、コマンドパラメータの 3 つの部分の合計バイト数です。 |
| 機器コード | 1 | 0x03 | 固定値、LRF S シリーズ測距モジュール |
| コマンドコード | 1 | 0~255 | 現在の制御コマンドの制御対象を示します。 |
| コマンドパラメータ | 0~4 | 0~255 | 現在の制御コマンドの制御オブジェクトパラメータを示します |
| チェックサム | 1 | 0~255 | チェックサムは、機器コード、コマンドコード、コマンドパラメータの 3 つの部分の全バイトデータと下位 8 ビットの合計です。 |
1.3 制御コマンド(システム→測距モジュール)
| コマンドコード | 説明する | コマンドパラメータバイト |
| www.jioptics.com | 設備の自主検査 | 0 |
| 0x02 | 単一測距 | 0 |
| 0x03 | 最初/最後/複数のターゲットを設定する | 1 |
| 0x04 | 連続測距 | 0 |
| 0x05 | 測距を停止する | 0 |
| 0xA0 | レーザー測距モジュールのボーレートを設定します | 4 |
| 0xA1 | 連続測距周波数を設定する | 2 |
| 0xA3 | 最小ゲート距離を設定する | 2 |
| 0xA3 | 最小ゲート距離を問い合わせる | 0 |
| 0xA4 | 最大ゲート距離 | 2 |
| AESA radar | 最大ゲート距離を問い合わせる | 0 |
| 0xA6 | FPGA ソフトウェアのバージョン番号を問い合わせる | 0 |
| 0xA7 | MCU ソフトウェアのバージョン番号を問い合わせる | 0 |
| 0xA8 | ハードウェアのバージョン番号を問い合わせる | 0 |
| 0xA9 | Sn番号を問い合わせる | 0 |
| 0x90 | 光出力の合計回数 | 0 |
| 0x91 | 今回は電源のオンと消灯の時間を問い合わせます | 0 |
1.4 応答データ (測距モジュール)→システム)
| コマンドコード | 説明する | コマンドパラメータバイト |
| www.jioptics.com | 設備の自主検査 | 4 |
| 0x02 | 単一測距 | 7 |
| 0x03 | 最初/最後/複数のターゲットを設定する | 0 |
| 0x04 | 連続測距 | 4 |
| 0x05 | 測距を停止する | 0 |
| 0x06 | レンジング異常(レンジング異常コマンドの状態が異常の場合のみ、単独レンジングまたは連続レンジングの応答コマンドを返した後にコマンドを返す) | 4 |
| 0xA0 | レーザー測距モジュールのボーレートを設定します | 4 |
| 0xA1 | 連続測距周波数を設定する | 2 |
| 0xA3 | 最小ゲート距離を設定する | 2 |
| 0xA3 | 最小ゲート距離を問い合わせる | 2 |
| 0xA4 | 最大ゲート距離 | 2 |
| AESA radar | 最大ゲート距離を問い合わせる | 2 |
| 0xA6 | FPGA ソフトウェアのバージョン番号を問い合わせる | 4 |
| 0xA7 | MCU ソフトウェアのバージョン番号を問い合わせる | 4 |
| 0xA8 | ハードウェアのバージョン番号を問い合わせる | 4 |
| 0xA9 | Sn番号を問い合わせる | 3 |
| 0x90 | 光出力の合計回数 | 3 |
| 0x91 | 今回は電源のオンと消灯の時間を問い合わせます | 3 |
1.5 操作プロセス
測距モジュールの電源がオンになると、デフォルトでスタンバイ モードになります。モジュールの電源スイッチを約 0.5 秒間有効にする (power_on がプルアップされる) (駆動コンデンサの充電が完了する) 必要があり、その後、以下の 6.2 のすべてのコマンド操作を実行できるようになります。
2 具体的な協定
2.1 設備の自主検査
2.1.1 レーザー測距モジュールに送信:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 |
| 説明する | 0xEE | 0x16 | 0x02 | 0x03 | www.jioptics.com | 0x04 |
2.1.2 レーザー測距モジュールの戻り値:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 説明する | 0xEE | 0x16 | 0x06 | 0x03 | www.jioptics.com | ステータス3 | ステータス2 | ステータス1 | ステータス0 | チェックサム |
| Status3:reservedStatus2:エコー強度 0x00~0xFFStatus1:bit0 -- FPGA システムステータス。 1 正常 0 例外bit1 -- レーザー光の出力状態。 1 光出力 0 ライトビット 2 なし -- 主波検出ステータス。 1 メイン波 0 メイン波なし bit3 -- エコー検出ステータス。 1 echo 0 no echobit4 -- バイアス スイッチのステータス。 1 バイアスオン 0 バイアスオフbit5 -- バイアス出力状態。 1 バイアス電圧は正常です 0 バイアス異常bit6 -- 温度状態。 1 温度は正常です 0 温度異常 bit7 -- 光出力オフ状態。 1 有効 0 無効Status0: bit0 -- 5v6 電源ステータス。 1 通常 0 例外 | ||||||||||
2.2 単一レンジング
2.2.1 レーザー測距モジュールに送信:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 |
| 説明する | 0xEE | 0x16 | 0x02 | 0x03 | 0x02 | 0x05 |
2.2.2 レーザー測距モジュールの戻り:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 説明する | 0xEE | 0x16 | 0x06 | 0x03 | 0x02 | 状態 | レンジ値整数上位 8 ビット | レンジ値の整数の下位 8 ビット | 範囲値の小数点以下の桁数 | チェックサム |
| 最初または最後のターゲットを測距する場合:ステータス: 0x00 は測距結果が単一のターゲットであることを示します。 0x01 は測距結果に前方のターゲットがあることを示します。 0x02 は測距結果に後方ターゲットがあることを示します。 0x03 予約済み。 0x04 は測距結果が範囲外であることを示します。 0x05 予約済み;マルチターゲット測距の場合:Status_ bit3~0: 0x0 は測距結果が単一のターゲットであることを示します。 0x1 は測距結果に前方のターゲットがあることを示します。 0x2 は測距結果に後方ターゲットがあることを示します。 0x3 は測距結果に前方ターゲットと後方ターゲットがあることを示します。 0x4 は測距結果が範囲外であることを示します。 0x5 予約済み;Status_ bit7~4: 0x0 ~ 0xf は現在の距離結果番号を示します。値の範囲 [0, N-1]、ターゲットの数 1 ≤ N ≤ 16、範囲値 = 範囲値の整数の上位 8 ビット × 256 + 範囲値の整数の下位 8 ビット + 範囲値の 10 進数ビット × 0.1、単位 m | ||||||||||
2.3 最初/最後/複数のターゲットを設定する
2.3.1 レーザー測距モジュールに送信:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
| 説明する | 0xEE | 0x16 | 0x03(データ長) | 0x03 | 0x03 | ターゲット | チェックサム |
| Target:0x01 最初のターゲット範囲を設定します。 0x02 端末ターゲット範囲を設定します。 0x03 マルチターゲット範囲を設定します。 | |||||||
2.3.2 レーザー測距モジュールの戻り:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 |
| 説明する | 0xEE | 0x16 | 0x02 | 0x03 | 0x03 | 0x06 |
2.4 連続測距
2.4.1 レーザー測距モジュールに送信:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 |
| 説明する | 0xEE | 0x16 | 0x02 | 0x03 | 0x03 | 0x06 |
2.4.2 レーザー測距モジュールの戻り:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 説明する | 0xEE | 0x16 | 0x06 | 0x03 | 0x04 | 状態 | レンジ値整数上位 8 ビット | レンジ値の整数の下位 8 ビット | 範囲値の小数点以下の桁数 | チェックサム |
| 最初と最後のターゲットを測距する場合:ステータス: 0x00 は測距結果が 1 つのターゲットであることを示します。 0x01 は測距結果に前方のターゲットがあることを示します。 0x02 は測距結果に後方ターゲットがあることを示します。 0x03 予約済み。 0x04 は測距結果が範囲外であることを示します。 0x05 予約済み;マルチターゲット測距の場合:Status_ bit3~0: 0x0 は測距結果が単一のターゲットであることを示します。 0x1 は測距結果に前方のターゲットがあることを示します。 0x2 は測距結果に後方ターゲットがあることを示します。 0x3 は測距結果に前方ターゲットと後方ターゲットがあることを示します。 0x4 は測距結果が範囲外であることを示します。 0x5 予約済み;Status_ bit7~4: 0x0 ~ 0xf は現在の距離結果番号を示します。値の範囲 [0, N-1]、ターゲット数 1 ≤ N ≤ 16。 | ||||||||||
2.5 ストップレンジング
2.5.1 レーザー測距モジュールに送信:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 |
| 説明する | 0xEE | 0x16 | 0x02 | 0x03 | 0x05 | 0x08 |
2.5.2 レーザー測距モジュールの戻り値:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 |
| 説明する | 0xEE | 0x16 | 0x02 | 0x03 | 0x05 | 0x08 |
2.6 測距異常
レーザー測距モジュールの戻り値:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| 説明する | 0xEE | 0x16 | 0x06 | 0x03 | 0x06 | 予約する | 予約する | 予約する | ステータス1 | チェックサム | |
| Status1: bit0 -- FPGA システムのステータス。 1 通常 0 例外 Bit1 -- レーザー光の出力状態。 1 光出力 0 光なし Bit2 -- 主波検出ステータス。 1 主波 0 主波なし Bit3 -- エコー検出ステータス。 1 エコー 0 エコーなし Bit4 -- バイアス スイッチのステータス。 1 バイアス オン 0 バイアス オフ Bit5 -- バイアス出力状態。 1 バイアス電圧は正常です 0 バイアス異常 Bit6 -- 温度状態。 1 温度は正常です 0 温度異常 Bit7 -- 光出力オフ状態。 1 有効 0 無効 この命令はステータス 1 のビット 0 ~ 7 が異常の場合にのみ返されます。 | |||||||||||
2.7 レーザー測距モジュールのボーレートを設定する
2.7.1 レーザー測距モジュールに送信:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 説明する | 0xEE | 0x16 | 0x06 | 0x03 | 0xA0 | ボーハイ24 | ボーハイ16 | BaudLow8 | ボーロー0 | チェックサム |
2.7.2 レーザー測距モジュールの戻り:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 説明する | 0xEE | 0x16 | 0x06 | 0x03 | 0xA0 | ボーハイ24 | ボーハイ16 | BaudLow8 | ボーロー0 | チェックサム |
2.8 連続測距周波数の設定
2.8.1 レーザー測距モジュールに送信:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 説明する | 0xEE | 0x16 | 0x04(データ長) | 0x03 | 0x0A1 | 周波数 | 番号 | チェックサム |
| Freq: 0x01~0x0A 単一/連続測距周波数Num:0x00 リザーブ | ||||||||
2.8.2 レーザー測距モジュールの戻り値:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 |
| 説明する | 0xEE | 0x16 | 0x02 | 0x03 | 0xA1 | 0xA4 |
2.9 最小ゲート距離の設定
2.9.1 レーザー測距モジュールに送信:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 説明する | 0xEE | 0x16 | 0x04(データ長) | 0x03 | 0xA3 | 皿 | DIS_L | チェックサム |
| DIS_H: 距離上位 8 ビットDIS_L: 距離下位 8 ビットDIS: 10 ~ 20000 最小ゲート距離範囲 (M 単位) | ||||||||
2.9.2 レーザー測距モジュールの戻り:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 説明する | 0xEE | 0x16 | 0x04(データ長) | 0x03 | 0xA3 | 皿 | DIS_L | チェックサム |
| DIS_H: 距離上位 8 ビットDIS_L: 距離下位 8 ビットDIS: 10 ~ 20000 最小ゲート距離範囲 (M 単位) | ||||||||
2.10 最小ゲート距離のクエリ
2.10.1 レーザー測距モジュールに送信します。
| バイト | 0 | 1 | 2 | 3 | 4 | 5 |
| 説明する | 0xEE | 0x16 | 0x02 | 0x03 | 0xA3 | 0xA6 |
2.10.2 レーザー測距モジュールの戻り:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 説明する | 0xEE | 0x16 | 0x04(データ長) | 0x03 | 0xA3 | 皿 | DIS_L | チェックサム |
| DIS_H: 距離上位 8 ビットDIS_L: 距離下位 8 ビットDIS: 10 ~ 20000 最小ゲート距離範囲 (M 単位) | ||||||||
2.11 最大ゲート距離の設定
2.11.1 レーザー測距モジュールに送信します。
| バイト | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 説明する | 0xEE | 0x16 | 0x04(データ長) | 0x03 | 0xA4 | 皿 | DIS_L | チェックサム |
| DIS_H: 距離上位 8 ビットDIS_L: 距離下位 8 ビットDIS: 10 ~ 20000 最小ゲート距離範囲 (M 単位) | ||||||||
| バイト | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 説明する | 0xEE | 0x16 | 測距周波数 | 0x03 | 0xA4 | 皿 | DIS_L | チェックサム |
| DIS_H: 距離上位 8 ビットDIS_L: 距離下位 8 ビットDIS: 10 ~ 20000 最小ゲート距離範囲 (M 単位) | ||||||||
2.12 最大ゲート距離の問い合わせ
2.10.1 レーザー測距モジュールに送信します。
| バイト | 0 | 1 | 2 | 3 | 4 | 5 |
| 説明する | 0xEE | 0x16 | 0x02 | 0x03 | AESA radar | 0xA8 |
2.12.2 レーザー測距モジュールの戻り値:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 説明する | 0xEE | 0x16 | 測距周波数 | 0x03 | 0xA5 | 皿 | DIS_L | チェックサム |
| DIS_H: 距離上位 8 ビットDIS_L: 距離下位 8 ビットDIS: 10 ~ 20000 最小ゲート距離範囲 (M 単位) | ||||||||
2.13 FPGA ソフトウェアのバージョン番号を問い合わせる
2.13.1 レーザー測距モジュールに送信します。
| バイト | 0 | 1 | 2 | 3 | 4 | 5 |
| 説明する | 0xEE | 0x16 | 0x02 | 0x03 | 0xA6 | 0xA9 |
2.13.2 レーザー測距モジュールの戻り値:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 説明する | 0xEE | 0x16 | 0x06 | 0x03 | 0xA6 | バージョン | 日付 | 月年 | 著者 | チェックサム |
| バージョン: bit7~bit4 メジャーバージョン番号(1~15) bit3~bit0 マイナーバージョン番号(0~15)例: 0x10——V1.0Data: Date(1~31)Mon Year: bit7~bit4 月(1~12)bit3~bit0 特定の年(0~15)、2020-2035に対応Author: 0x6c cliu; 0x5d dwu 0xcc cycheng | ||||||||||
2.14 MCU ソフトウェアのバージョン番号を問い合わせる
2.14.1 レーザー測距モジュールに送信します。
| バイト | 0 | 1 | 2 | 3 | 4 | 5 |
| 説明する | 0xEE | 0x16 | 0x02 | 0x03 | 0xA7 | 0xAA |
| バイト | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 説明する | 0xEE | 0x16 | 0x06 | 0x03 | 0xA7 | バージョン | 日付 | 月年 | 著者 | チェックサム |
| バージョン: bit7~bit4 メジャーバージョン番号(1~15)bit3~bit0 マイナーバージョン番号(0~15)例: 0x10——V1.0Data: Date(1~31)Mon Year: bit7~bit4 month(1~12)bit3~bit0 特定の年(0~15A)、2020-2035に対応Author: 0x00 jyang 0xf1 llfu 0x01 ズクシオン | ||||||||||
2.15 ハードウェアのバージョン番号を問い合わせる
2.15.1 レーザー測距モジュールに送信します。
| バイト | 0 | 1 | 2 | 3 | 4 | 5 |
| 説明する | 0xEE | 0x16 | 0x02 | 0x03 | 0xA8 | 0xAB |
2.16.2 レーザー測距モジュールの戻り値:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| 説明する | 0xEE | 0x16 | 0x06 | 0x03 | 0xA8 | MBVS | CTVS | APDVS | LDVS | チェックサム | |
| MBVS: マザーボードのハードウェア バージョン番号CTVS: コントロール ボードのハードウェア バージョン番号Apdvs: 検出ボードのハードウェア バージョン番号LDVS: ドライバー ボードのハードウェア バージョン番号bit7 ~ bit4 メジャー バージョン番号 (1 ~ 15) bit3 ~ bit0 マイナー バージョン番号 (0 ~ 15) 例:0x10——V1。 0 | |||||||||||
2.16 Sn番号の問い合わせ
2.16.1 レーザー測距モジュールに送信します。
| バイト | 0 | 1 | 2 | 3 | 4 | 5 |
| 説明する | 0xEE | 0x16 | 0x02 | 0x03 | 0xA9 | 0xAC |
2.16.2 レーザー測距モジュールの戻り値:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 説明する | 0xEE | 0x16 | 0x05 | 0x03 | 0xA9 | 月年 | Num_H | Num_L | チェックサム |
| Monyear:bit7~bit4 月(1~12) Bit3~bit0 年(0~15)、2020~2035に対応Num_H:数字は8桁highNum_50:NoNumの下位8桁:1~999No | |||||||||
2.17 光出力の合計回数
2.15.1 レーザー測距モジュールに送信します。
| バイト | 0 | 1 | 2 | 3 | 4 | 5 |
| 説明する | 0xEE | 0x16 | 0x02 | 0x03 | 0x90 | 0x93 |
| バイト | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 説明する | 0xEE | 0x16 | 0x05 | 0x03 | 0x90 | PNUM3 | 6.1 梱包 | PNUM1 | チェックサム |
| PNUM3: 総光出力時間、bit23 ~ bit16PNUM2: 総光出力時間、bit15 ~ bit8PNUM1: 総光出力時間、bit7 ~ bit0 | |||||||||
2.18 今回の電源オン・消灯時間を問い合わせる
2.18.1 レーザー測距モジュールに送信します。
| バイト | 0 | 1 | 2 | 3 | 4 | 5 |
| 説明する | 0xEE | 0x16 | 0x02 | 0x03 | 0x91 | 0x94 |
2.18.2 レーザー測距モジュールの戻り値:
| バイト | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 説明する | 0xEE | 0x16 | 0x05 | 0x03 | 0x91 | PNUM3 | PNUM2 | PNUM1 | チェックサム |
| PNUM3: 総光出力時間、bit23 ~ bit16PNUM2: 総光出力時間、bit15 ~ bit8PNUM1: 総光出力時間、bit7 ~ bit0 | |||||||||
3 命令例
| 3.1 機器の自己検査SEND: ee 16 02 03 01 04RECV: ee 16 06 03 01 ff 00 f7 ff f9 | 3.5 最初のターゲットを設定するSEND: ee 16 03 03 03 01 07RECV: ee 16 02 03 03 06 |
| 3.2 シングルレンジングSEND: ee 16 02 03 02 05RECV: ee 16 06 03 02 04 00 00 00 09 | 3.6 最終目標を設定するSEND: ee 16 03 03 03 02 08 RECV: ee 16 02 03 03 06 |
| 3.3 連続測距SEND: ee 16 02 03 04 07RECV: ee 16 06 03 04 04 00 00 00 0bRECV: ee 16 06 03 04 04 00 00 00 0bRECV: …… | 3.7 複数のターゲットを設定するSEND: ee 16 03 03 03 03 09 RECV: ee 16 02 03 03 06 |
| 3.4 ストップレンジング SEND: 16 02 03 05 08の場合 RECV: 16 02 03 05 08の場合 | 3.8 連続測距周波数の設定 1HzSEND: ee 16 04 03 a1 01 00 a5RECV: ee 16 02 03 a1 a4 |
| 3.9 連続測距周波数の設定 5HzSEND: ee 16 04 03 a1 05 00 a9RECV: ee 16 02 03 a1 a4 |
使用説明書
1. この取扱保守マニュアルは、小型レーザー距離計 STA-AM30X の各種機能を安全に正しくご使用いただくために、操作および保守について説明したものです。本製品のオペレータおよび保守員が対象となります。
STA-AM30X 小型レーザー距離計(以下、レーザー距離計)は、測定対象物に向けてレーザーを照射し、レーザーの飛行時間に基づいて距離情報を計算する精密光電子製品です。このレーザー距離計は、Uart(TTL_3.3V)通信インターフェースによる通信を実現しており、優れた性能と簡単な操作が特徴です。この距離計のレーザーは人間の目に直接さらされることは禁止されています。
2. 光学窓の選択とコーティングに関する推奨事項
2.1 材料に関する推奨事項
光学窓の材質は光学ガラスH-K9Lを推奨します。 H-K9L は最も一般的な無色の光学ガラスで、300nm ~ 2100nm のレーザー範囲に適しています。コストパフォーマンスが高く、物性も優れています。
2.2 処理に関する推奨事項
光学窓のくさび角度の公差は、できるだけ小さくする必要があります。ウェッジ角度の公差は ≤ 3' (公差等級 ≤ レベル 7) にすることをお勧めします。
光学窓の光学面はできるだけ滑らかである必要があります。プロファイルの算術平均偏差 (Ra) は 0.012 であることが推奨されます。
2.3 コーティングの推奨事項
システム統合全体でウィンドウ レンズを使用する場合、レンズの透過率が 1535±20nm の波長帯域で 98% 以上で、厚さが 2mm 以下であることが推奨されます。レンズとモジュール端面の間の距離は ≤ 3mm、ヨー角 ≤ 1.5°、ピッチ角 ≤ 30° である必要があります。

1535nmレーザー距離計の光学窓には、1525nm~1545nmの範囲で透過率99%以上の反射防止膜をコーティングすることを推奨します。
製品の使用環境に応じて、光学窓の外面に疎水性フィルムや硬質フィルムなどの保護フィルムを追加で選択してコーティングすることも可能です。残りの指標についてはMIL-STD-810Gを参照し、透過率が97%以上である必要があります。
2.4 光学窓の形状と使用に関する推奨事項
光学窓の有効口径は製品によって異なります。その外形寸法は、光学窓の有効開口 - 光学窓の外径 ≥ 2mm、および測距アンテナの外径 - 光学窓の有効開口の投影寸法 ≥ 1.5 mm を保証する必要があります。模式図を以下に示します。光学窓にはレーザーの吸収がありますので、外形寸法に応じて光学窓自体の厚みを2~4mm以内に制御することを推奨します。
光学窓は透過率が高いため、出射光軸と光学窓法線との軸ズレを0°~2°以内に抑えることを推奨します。光学窓と 2 つの鏡筒の位置の概略図を以下に示します。同時に、光学窓と距離計の間のエアギャップは可能な限り小さくする必要があります。図 4 は、2 つの方法での光学窓の配置の概略図を示しています。
光学窓の有効口径 y2 - 光学窓の外径 y1 > 2mm
距離計アンテナの外径y3-光学窓の有効開口の投影サイズy2、>1.5mm
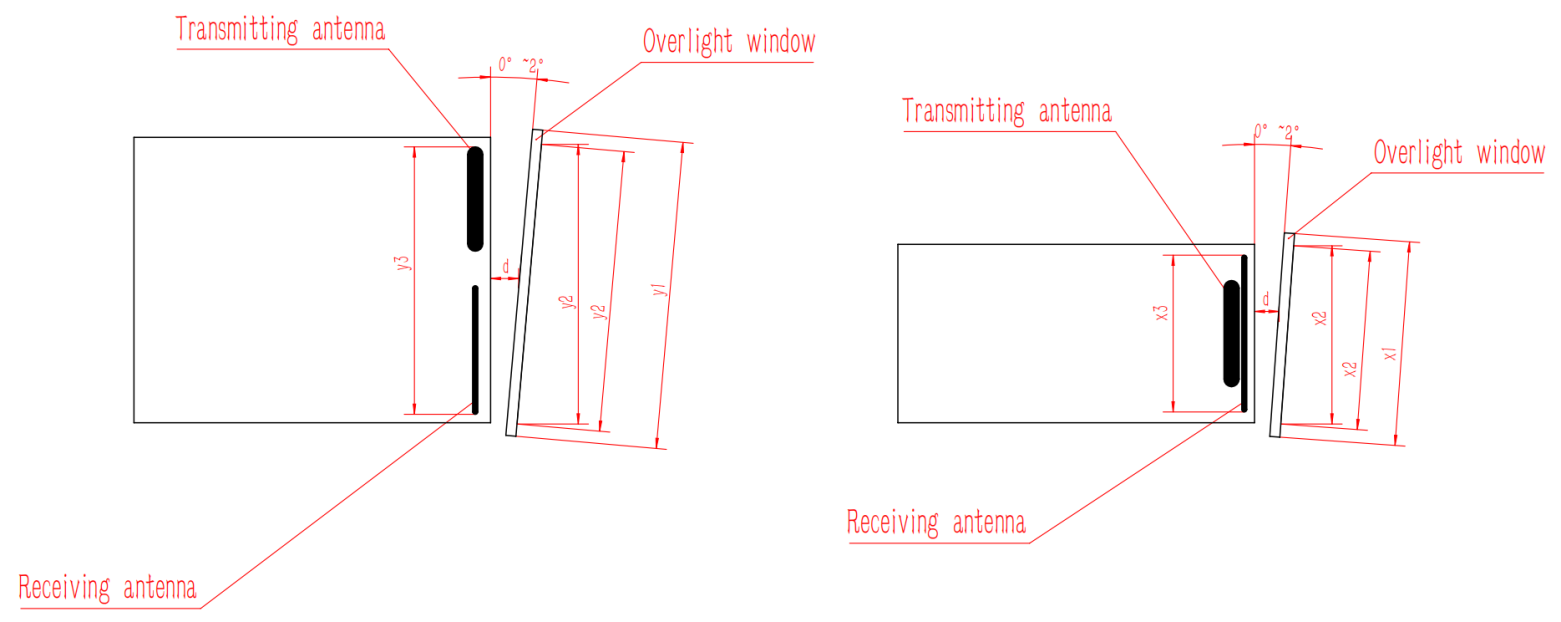
光学窓と距離計の間の空隙 d はできるだけ小さくする必要があります。光学窓の有効口径 x2 - 光学窓の外径 x1 > 2mm
測距アンテナの外径×3-光学窓の有効開口の投影サイズ×2、>1.5mm
光学窓と距離計の間の空隙 d は、できるだけ小さくする必要があります。
2通りの光学窓の外形寸法と配置の模式図
3. 運用について 本システムの全機能を十分に理解し、導入、運用、保守方法を正しく習得していただくために、本システムを導入およびご使用になる前に、この章の内容をよくお読みください。
3.1 電源投入時の操作
3.1.1 電源を入れる前に
図に示すように、レーザー距離計、デバッグ ケーブル、DC 電源、ホスト コンピューターを接続します。
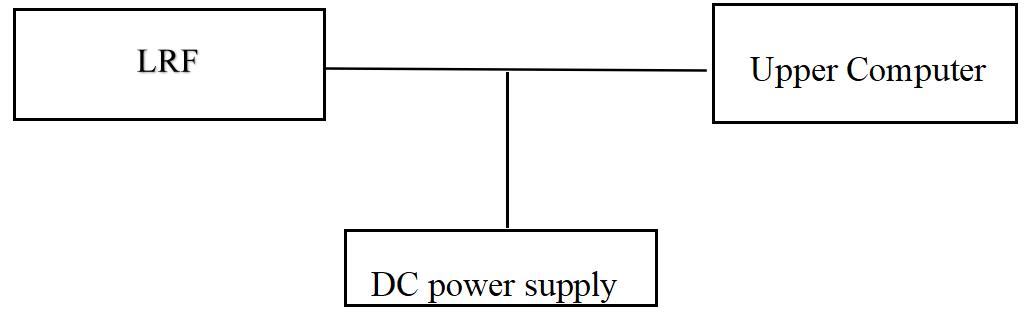
接続の概略図
3.1.2 電源投入
電源投入操作:電源を接続します。
3.2 電源オフの操作
3.2.1 電源を切る前に
電源を切る前に、各製品の作業プロセスやタスクが終了状態にあり、プログラムが終了していることを確認してください。
3.2.2 電源オフ
電源を切る手順: 電源を切断します。
3.3 操作
3.3.1 測距モード
測距モードの操作方法:
a) 「シングル測距」コマンドをレーザー距離計に送信します。レーザー距離計は単一測距を実行し、測距ステータスと距離値を報告します。
b) 「1Hz Rangeing」コマンドをレーザー距離計に送信します。レーザー距離計は 1 秒に 1 回測距を実行し、測距ステータスと距離値を報告します。
c) レンジングを停止するには、「Stop Ranging」コマンドを送信します。
d) 「5Hz Rangeing」コマンドをレーザー距離計に送信します。レーザー距離計は 1 秒あたり 5 回測距を実行し、測距ステータスと距離値を報告します。
e) レンジングを停止するには、「Stop Ranging」コマンドを送信します。
f) 「10Hz Rangeing」コマンドをレーザー距離計に送信します。レーザー距離計は 1 秒あたり 10 回測距を実行し、測距ステータスと距離値を報告します。
g) レンジングを停止するには、「Stop Ranging」コマンドを送信します。
3.3.2 距離ゲート設定
距離ゲートとは、測距機能の範囲内でゲート距離のセクション (16 進数で表される) を設定することを意味します。ゲート値よりも低いターゲット距離情報は返信されず、測定範囲内でゲート値よりも高い測距値が有効な測距値となります。
設定が必要な場合の操作方法は以下の通りです。
a) 「ゲート値設定」コマンドをレーザー距離計に送信します。
「測距」コマンドをレーザー距離計に送信します。レーザー距離計は測距を実行し、返送された距離値が距離ゲート値より大きいかどうかを判断し、測距結果を報告します。
c) 「Stop Ranging」コマンドを送信して、レンジング動作を停止します。距離ゲーティング機能が不要な場合は、手動で初期設定に戻す(ゲーティング値を0に設定する)必要があります。
3.3.3 セルフチェックモード
セルフチェックの操作方法:
a) レーザー距離計に「セルフチェック問い合わせ」命令を送信します。レーザー距離計は自己診断を開始し、現在の周囲温度や動作状況などの情報を送り返します。
4. 点検・保守
4.1 一般検査
製品の初回使用時およびリソースモジュール交換後は、目視検査および通電検査を実施してください。通常使用の製品については、使用前の通電検査のみが必要です。
検査方法
目視検査の手順は次のとおりです。
a) 製品の外観が正常かどうかを確認します。
b) ケーブルの接続に誤りがないか、しっかりと接続されていることを確認してください。
4.1.2 通電検査
電源投入検査の手順は次のとおりです。
d) 3.2 の手順に従って電源オフ操作を完了します。
b) セルフテストモジュールを開始します。
c) 検査終了後は、3.2 の手順に従って電源遮断操作を完了してください。
4.2 定期的なメンテナンス
レーザー距離計は、通常の使用条件下ではメンテナンスの必要はありません。塵埃のない環境で1年以上保管した場合はメンテナンスが必要です。メンテナンス内容には以下が含まれます。
4. 点検・保守
製品の一般点検は非通電時に行ってください。手順は次のとおりです。
a) 製品およびテスト ケーブル プラグ (ソケット) 上のすべてのマークと番号は正確かつ明確である必要があります。
b) パネル上のあらゆる種類のネジを締める必要があります。
c) 製品の光学ガラスには、目視により、シミ、あばた、水垢、カビ、指紋、粉塵等の通常の観察に支障をきたすような付着物及び亀裂がないことを確認すること。
4.2.2 通電検査
レーザー距離計の電源を入れた状態で、総合的な検査とメンテナンスを行ってください。内容には次のものが含まれます。
a) 製品の電源を順番に入れます。
b) 3.1 の手順に従って電源投入操作を完了します。
c) 製品セルフテスト モジュールを開始し、製品セルフテストを完了します。
d) 3.2 の手順に従って電源オフ操作を完了します。
5. 故障症状の分析とトラブルシューティング方法
レーザー距離計は精密製品です。障害が発生した場合、障害の分析、位置特定、修理のためにデバイス全体を工場に戻す必要があります。自己修復は認められません。
一般的な障害の症状とトラブルシューティング方法を次の表に示します。
一般的な障害の症状とトラブルシューティング方法
| 故障の症状 | 考えられる理由 | 検査方法 | トラブル時の対策 |
| 製品の電源が正常にオンにならない。 | a) 電源および接続ケーブルの故障。b) 回路の故障。 | 電源と接続ケーブルを確認してください。 | a) 電源または接続ケーブルを交換します。b) b) 回路障害の場合は、製造元に連絡して問題解決の支援を求めてください。 |
| 通信情報を返信できません。 | a) 接続ケーブルの故障 b) 電源の異常 c) c) レーザー距離計の通信故障 | a) 接続ケーブルが正常かどうかを確認してください。b) 電源が正常かどうかを確認してください。 | a) 接続ケーブルと電源を交換します。 b) 通信の問題については、製造元に問い合わせて解決の支援を受けてください。 |
6. 梱包、輸送、保管の要件
6.1 梱包
開封済みで再入荷が必要な商品は、元の梱包に従って梱包してください。製品を工場に返品する必要がある場合は、できる限り元の梱包を使用してください。他の形式の梱包を使用した場合でも、製品の性能の低下や製品の損傷を引き起こすことはありません。
6.2 輸送
再梱包された製品は、自動車、電車、飛行機、船舶などで輸送することができます。輸送中は、衝撃、乱暴な取り扱い、雨や雪にさらされるなどの現象を避けるために、梱包された製品を輸送手段に固定する必要があります。道路輸送および鉄道輸送環境についてはMIL-STD-810Gを参照してください。
6.3 保管
再梱包された製品は屋外で屋外に保管しないでください。保管温度は 0℃ ~ +30℃、相対湿度は 80% 以下で、腐食性物質の浸食、強い機械的振動や衝撃、強い磁場のない倉庫に保管してください。
安全上の注意事項
本製品を安全にご使用いただくために、ご使用の前にこの取扱説明書をよくお読みください。
l このレーザー距離計は精密な光学および機械製品です。規制に違反して操作すると、危険なレーザー傷害につながる可能性があります。レーザー距離計のいかなる部分も開けたり、調整したりしないでください。また、レーザー距離計の性能を自分で修理したり調整したりしないでください。
l 静電気保護に注意してください: レーザー距離計の電子部品は静電気放電に敏感です。保護手段を講じずに電子機器に触れないでください。
l レーザー距離計の電源は、指定された電圧および出力範囲内で動作する場合にのみオンにしてください。
l 光学レンズに指や硬いものを触れないでください(油汚れやレンズの傷を防ぐため)。
l 反射率の高い対象物を近距離で測定することは禁止されています(検出器のコア部品の損傷などを防ぐため)。
l レーザー距離計を指定外の条件(汚染度の高い環境、保管温度範囲を超えるなど)で保管することは禁止されています。
l レーザー距離計に強い機械的衝撃(振動、衝撃、落下など)を与えないでください。

OEM/ODM 1-90km LRF モジュール
最小ゲート距離を問い合わせる
電子メール: sales@jioptics.com
Webサイト:www.jioptics.com
住所:深セン市龍崗区龍城大道2017号
ホットタグ: Monikäyttöinen lämpökuvausmonokulaari
関連カテゴリー
905nm レーザー距離計モジュール
1535nm レーザーレンジファインダーモジュール
1570nm レーザーレンジファインダーモジュール
1.54umレーザーレンジファインダーモジュール
1064NMレーザーターゲット指定子
アンチドローンSTSTEMモジュール
測距ライダーモジュール
お問い合わせを送信
下記フォームよりお気軽にお問い合わせください。 24時間以内に返信いたします。