距離測定を製品 (UAV ペイロード、EO/IR デバイス、産業用光学機器、スマート モニタリング、ロボット工学など) に統合しようとしたことがある場合は、 あなたはすでに醜い真実を知っています:測距センサーが「単なる一部」であることはほとんどありません。これはシステムの決定により、デバイスが堅実であるように感じられたり、ひどく信頼性が低く感じられたりする可能性があります。この記事では、レーザー距離計モジュール本当に実現する必要があること、統合が通常失敗する場所、仕様、テスト、 驚くことが少なく展開できます。メーカーの好みも参考にさせていただきます深セン市光技術有限公司 誰のページもコピーせずに、OEM 統合用のモジュールを配置します。
抽象的な
A レーザー距離計モジュール一見難しい問題、つまり現実世界のターゲット、照明、天候、動きにわたる信頼性の高い距離測定を解決できます。 しかし、購入者は、曖昧な「航続距離」の主張、見落とされたインターフェイスの詳細、電力と熱の制約、正確なターゲット表面の検証が不十分であることに悩まされることがよくあります。 このブログでは、リスクを軽減し、開発サイクルを短縮し、現場でのパフォーマンスを向上させるために設計された、統合優先のチェックリスト、選択フレームワーク、テスト計画、および FAQ を提供します。
目次
概要
- 成功の定義: 「信頼できる距離」と「最大射程」
- ターゲット、環境、統合の制約に基づいて選択マトリックスを構築する
- 光学系と同じくらいインターフェイス、タイミング、エラー動作を優先する
- 本番環境にコミットする前に、現場でのテスト計画を実行する
- EEAT の証拠を文書化する: テスト結果、校正メモ、トレーサビリティ、サポートの準備状況
購入者は実際にどのような問題を抱えているのでしょうか?
誰かが私にこう言うと、「レーザー距離計モジュール「製品計画を書き換えることなく信頼できる距離データが必要です」という意味です。 問題点は、いくつかの予測可能な範囲に集中する傾向があります。
- 範囲の混乱:マーケティング範囲と、ターゲットのサイズ/素材の範囲と、天候/光の範囲。
- 統合による驚き:インターフェイス レベル、タイミング ジッター、出力フォーマット、および明確に定義されていないエラー コード。
- 電力/熱の制約:ピーク電流と熱放散がバッテリー寿命を縮めたり、ドリフトを引き起こしたりします。
- 「研究室で働く」症候群:優れたデモ結果、動き、振動、かすみ、または背景光による不安定なフィールド結果。
- 供給とサポートのリスク:一貫性のないビルド、キャリブレーションの差異、または生産を遅らせる不十分なドキュメント。
あなたが今うなずいているなら、それはいいことです。あなたは「好き嫌い」ではなく、注意を払っています。距離計は測定器であり、おもちゃではありません。
システム用語でレーザー距離計モジュールとは何ですか?
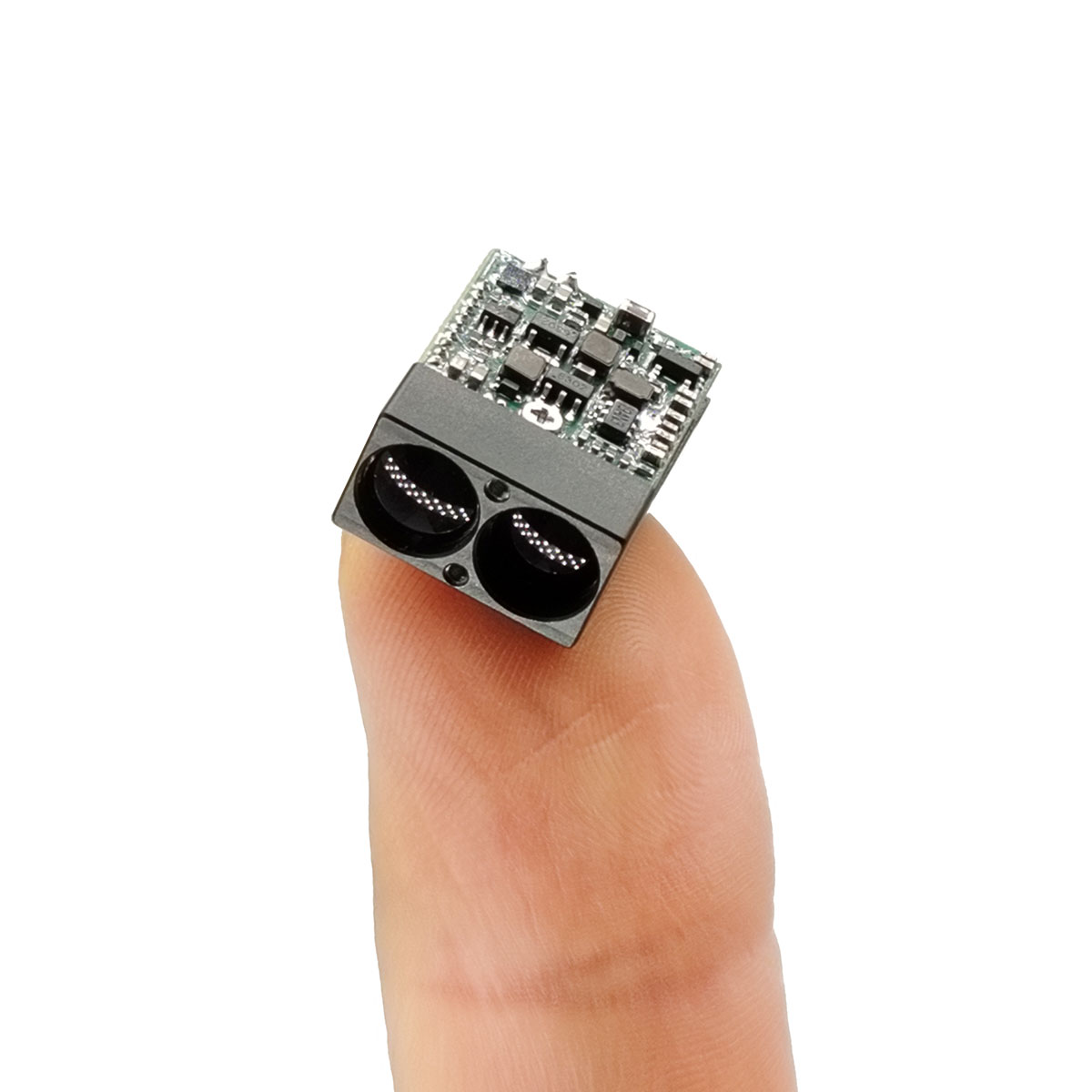
システム的に言えば、レーザー距離計モジュールは、次のものの密結合スタックです。
- エミッター + 光学系:レーザーパルス/ビームをターゲットに向けて送信します。
- レシーバー + フィルタリング:リターン信号を検出し、ノイズを除去します。
- タイミング/ToF ロジック:往復時間を測定して距離を推定します。
- ファームウェア + 出力プロトコル:結果をフォーマットし、モード (単一、連続、マルチターゲット) を提供し、エラー動作を定義します。
- 機械的 + 熱的設計:温度、振動、実行時間全体にわたってアライメントの安定性とパフォーマンスの一貫性を維持します。
これが、「ドロップイン交換」の主張が危険である理由です。たとえ寸法が一致していても、タイミング、フィルタリング、およびファームウェアの前提条件が一致しない可能性があります。
推測せずに適切なモジュールを選択するにはどうすればよいですか?
を選択することをお勧めしますレーザー距離計モジュール最大のキロ数を追うのではなく、「ターゲット + 環境 + 統合」マトリックスを使用します。 以下は、調達およびエンジニアリングのレビューに適用できる簡単な意思決定表です。
| 選択要素 | 何を定義するか | なぜそれが重要なのか |
|---|---|---|
| ターゲット | サイズ、反射率、角度、動き | 実際の範囲は測定対象に大きく依存します |
| 環境 | 太陽光/背景、霞/霧/塵、雨、温度 | ノイズと減衰によりドロップアウトや誤った測定値が発生する |
| 測定モード | 単一ターゲットと連続ターゲット、マルチターゲット、最初/最後のターゲット | アプリごとに異なる動作とフィルタリングが必要です |
| インタフェース | UART/シリアル、電圧レベル、タイミング、パケットフォーマット | 多くの場合、統合コストは光学系ではなくここに影響します。 |
| 電力と熱 | ピーク電流、平均消費量、放熱計画 | 電圧低下、ドリフト、実行時間制限を防止します |
| 製造の準備状況 | 校正、トレーサビリティ、文書化、サポート | 生産の差異と現場での返品を削減します |
などのメーカー深セン市光技術有限公司多くの場合、OEM 統合と製品ラインにわたる複数の距離クラスのオプションが強調されます。 これはまさに、1 回限りのプロトタイプではなく、規模を計画するときに確認したいものです。 :contentReference[oaicite:0]{index=0}
実際の導入ではどの仕様が最も重要ですか?
これが私の「だまされない」リストです。これらは実際に企業の成功を左右する仕様と行動です。レーザー距離計モジュール:
- 自信とエラー行動:品質指標を取得していますか?また、失敗は静かに失敗する (距離が間違っている) のではなく、大声で失敗しますか (明らかなエラー) か?
- 動作中の再現性:振動、高速パンニング、またはプラットフォームの移動でも安定した測定値を取得します。
- 最小範囲と近接場の動作:多くのアプリケーションは、遠距離ではなく近距離で壊れます。
- 更新速度と遅延:制御ループとトラッキングでは、生の最大範囲よりもタイミングが重視されます。
- 環境に対する堅牢性:かすみ、ほこり、背景光が強い場合、パフォーマンスがどのくらい早く低下するか。
- 位置合わせ公差:わずかなずれが現場で「距離の不安定さ」になる可能性があります。
EEAT では、データシートを繰り返すだけではありません。ターゲットの種類、距離、条件、合否のしきい値を示す内部テスト ログを保存します。 その証拠は、顧客が「私のシナリオではうまくいきますか?」と尋ねたときに信頼性を発揮します。
失敗の 80% の原因となる統合ミスは何ですか?
少し無慈悲なことを言うなら、ほとんどの失敗は「レーザー物理学」によるものではなく、統合の近道です。よくある罠は次のとおりです。
1) 「シリアルはシリアル」と仮定する
- 電圧レベルとロジックの期待値は異なります (TTL とその他)。推測せずに、検証して文書化してください。
- ファームウェア更新のためのパケット形式、チェックサム戦略、およびバージョン管理を定義します。
2) 紙の上では問題なく見える電力供給
- ピーク電流のスパイクは、特にバッテリーでリセットや読み取り値の不良を引き起こす可能性があります。
- 「モジュールが動作する」テストを「システム内でモジュールが動作する」テストから分離します。
3) 光学系を考慮しない機械的取り付け
- 振動、微小なずれ、熱膨張によりアライメントが変化する可能性があります。
- 安定した取り付けポイントと一貫した熱経路を計画します。
4) 「悪いターゲット」戦略を持たない
- 暗い表面、傾いた表面、または低反射表面では、リターン信号が大幅に減少する可能性があります。
- 信頼性が低下した場合、UI/ロジックには、再試行ルール、スムージング、モード切り替えなどのフォールバックが必要です。
スケーリングの前にどのような検証テスト計画を実行する必要がありますか?
これは私が気に入っている実用的な検証計画です。レーザー距離計モジュール。シンプルで測定可能で、不愉快な真実を早期に暴露します。
- ターゲットマトリックス:少なくとも 6 つのターゲット タイプ (明るい/ニュートラル/暗い、マット/光沢のある、平らな/角度のある、小さい/大きい) をテストします。
- 距離スイープ:製品に関連する近距離、中距離、遠距離での精度とドロップアウト率を検証します。
- 照明スイープ:屋内、屋外の日陰、屋外の強い背景光。
- 動き/振動:テーブルまたはプラットフォームの動きを揺さぶります。安定性と遅延を測定します。
- サーマルソーク:コールドスタート + 加温された定常状態。ログドリフト動作。
- EMI健全性チェック:ラジオ、モーター、スイッチングレギュレーター (通常のトラブルメーカー) と一緒に動作します。
- ファームウェアの動作:エラー コード、タイムアウト処理、および「ノーリターン」動作を確認します。
EEAT の下で信頼できるように見せたい場合は、簡略化されたテスト方法、測定内容、アプリケーションにおける「良好」の意味など、できる限りのことを公開してください。 それが「マーケティングコピー」と実際の権威との違いです。
レーザー距離計モジュールは通常どこで最も価値を発揮しますか?

A レーザー距離計モジュール距離が意思決定やユーザーの信頼を直接的に向上させる場合、その効果は維持されます。一般的な高価値シナリオには次のようなものがあります。
- UAV ペイロードとジンバル:スタンドオフ距離、ナビゲーション サポート、ターゲット追跡ワークフロー。
- EO/IR および熱デバイス:範囲オーバーレイ、識別サポート、視界が悪い場合の操作の明瞭さ。
- 工業用測定:機械的測定が遅いか安全ではない箇所をスポットチェックします。
- ロボティクスとモニタリング:視覚システムを補完するシンプルな直接距離チャネル。
上記のいずれかを構築する場合、選択プロセスでは再現性、エラー動作、統合の安定性を優先する必要があります。それが顧客が経験することだからです。
よくある質問
「最大通信距離」と「使用可能通信距離」の違いは何ですか?
最大射程は通常、制御された条件下で有利な目標に対して測定されます。使用可能な範囲とは、実際のターゲット タイプで一貫して達成できる範囲のことです 実際の照明、天気、動きの下で。製品の信頼性にとって重要なのは、使用可能な範囲だけです。
一部のターゲットが短距離でも失敗するのはなぜですか?
低い反射率、急な角度、鏡面、複雑な背景により、リターン信号の品質が低下します。優れた統合計画には、信頼性の処理が含まれます。 ロジックを再試行し、「ノーリターン」動作をクリアします。
レーザー距離計モジュールの統合時間を短縮するにはどうすればよいですか?
まずインターフェイス要件 (電圧レベル、プロトコル、タイミング、エラー コード) をロックダウンし、次にピーク負荷下での電力の完全性を検証し、最後にテストを行います。 実際のターゲット。これらを「後の」タスクとして扱わないでください。これはスケジュールのリスクが存在する場所です。
購入前にサプライヤーに何を尋ねるべきですか?
- 範囲の主張にはどのようなターゲット定義が使用されますか?
- 出力モードは何ですか?また、障害はどのように報告されますか?
- 推奨される電源設計と温度ガイダンスは何ですか?
- どのような文書が提供されますか (プロトコル、機械的、テストノート、校正アプローチ)?
- ファームウェアのアップデートとバージョンのトレーサビリティについてはどのような計画がありますか?
ToF は常に正しいアプローチなのでしょうか?
飛行時間型アプローチは堅牢な距離測定ワークフローにうまく対応しているため、実用的な距離測定では非常に一般的です。 それが「正しい」かどうかは、環境、範囲、更新レート、電力、コストなどの制約によって決まります。流行語ではなく、アプリケーションの真実に基づいて選択してください。
次のステップ
次回の統合を (「希望ベースのエンジニアリング」ではなく) 予測可能にしたい場合は、ターゲット/環境マトリックスを定義し、小規模な検証計画を実行し、 を選択し、レーザー距離計モジュール使用可能なパフォーマンスと統合の明確さに基づいています。
次のようなチームと協力する深セン市光技術有限公司OEM 志向のサプライヤーと、統合の結果を重視したモジュールのラインナップが必要な場合に理にかなっています。 :contentReference[oaicite:1]{index=1}
ターゲットのタイプ、動作条件、統合の制約を共有する準備はできていますか?お問い合わせ今日は、適切なモジュールと検証アプローチを実際のユースケースに合わせて、より速く、よりクリーンに、そして現場での予期せぬ事態を減らしてみましょう。